




Впечатления от нее остались двоякие. В комментариях мне были даны полезные советы, которые я учел при дальнейшей сборке модели. Кстати на HK теперь продаются таротовские рамы, вот например 680pro Гексакоптер Tarot 680PRO со складывающейся рамой из 3K карбона (набор) .
Укомплектовал раму следующей электроникой:
Контроллер предполагался APM 2.5.2 Автопилот HKPilot Mega V2.5 USB/GYRO/ACC/MAG/BARO
Но обстоятельства так сложились, что посылка, отправленная с HK, с контроллером потерялась. Она была отправлена, как раз когда начались проблемы с доставкой в конце осени 2013 года. Поэтому прождав два месяца, я уже в новом году заказал оригинальную версию APM 2.6 с 3DRobotics.

Силовую установку прикинул в калькуляторе http://www.ecalc.ch/xcoptercalc.php?ecalc&lang=ru. Конечно, верить на все сто процентов калькулятору не стоит, зачастую на деле показатели оказываются совершенно другими.

Моторы приглянулись multistar 3508 700кв Бесколлекторный, 14-полюсный двигатель 3508-700KV Turnigy Multistar для многороторных систем.
Двигатели на тот момент были в минусе, другие модели я не рассматривал. Может даже и к лучшему, так как на зарубежных форумах прочитал ряд отрицательных отзывов об этих моторах с HK. Китайцы экономят на всем, поэтому количество оборотов может оказаться совсем не то, что на этикетке. Поэтому выбрал вот такие http://www.himodel.com/electric/SUNNYSKY_V3508_700KV_Outrunner_Brushless_Motor_for_Multi-rotor_Aircraft.html .


Пропеллеры заказал эти http://www.foxtechfpv.com/foxtech-supreme-cf-propeller12x4-p-1190.html . Пропеллеры специальные, крепятся к мотору напрямую винтами. Качество пропеллеров высокое, балансировку делать не пришлось.

Беспокоиться об откручивании и проскальзывании теперь не стоит.
Регуляторы взял зарекомендовавшие себя 30А от DJI .

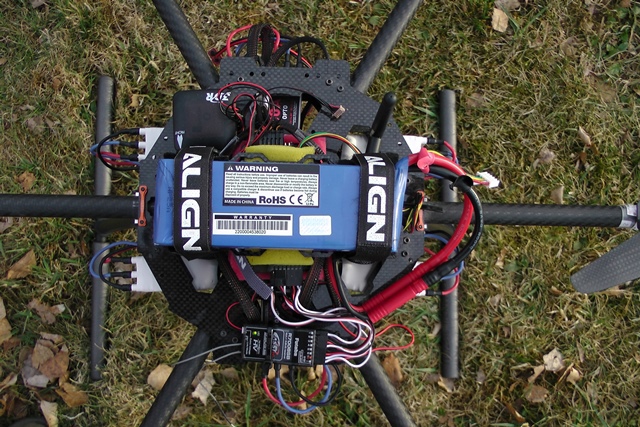
Аккумуляторные батареи Turnigy 4S 5000 mAh 40C две параллельно Аккумулятор литий-полимерный Turnigy 5000мАч 4S 40C.

С начинкой вроде бы все понятно. Теперь осталось только все собрать, настроить и облетать.
Сборка
Наверно самое сложное было разместить регуляторы. Места для регуляторов предусмотрены рядом с моторами, но я решил их туда не ставить.

Из-за складной конструкции, разместить электронику внутри рамы очень сложно. По центру закрепил плату распределения питания от Crius-a, а уже от нее стал двигаться.
Провода от моторов достаточно длинные, около 40 сантиметров. Для уменьшения наводок сплел из проводов косички.


В месте крепления поворотной части луча через него насквозь проходит винт, нужно быть аккуратным, чтобы не повредить им изоляцию, да и перетереться может об резьбу.
В связи с этим принял решение для надежности провода полностью убрать в защитный чулок.

Чтобы чулок не распускался, слегка оплавил концы, затем надрезал оплавленный край для удобства протаскивания проводов.

Теперь ничего не перетрется и не распустится, да и для внешнего вида не маловажно.
Подсветка
Одновременно с установкой силовой установки развел питание для подсветки. Питать решил через отдельный аккумулятор для дополнительного оборудования, тем более что силовые батареи 4s, а для дополнительного оборудования нужно 12 вольт.

В магазине электродеталей купил светодиодную полосу на клеящемся основании. Намотал на каждый луч по 5 оборотов полосы, а сверху одел прозрачную термоусадку.


Первые полеты показали, что подсветка нужна. На высоте 20 метров при интенсивных полетах легко потерять ориентацию коптера из-за особенностей симетричной конструкции. Нужно учитывать, что на солнце подсветка мало эффективна.
Колпак.
Изобретать тут нечего. В магазине купил нужного диаметра пластиковую крышку для СВЧ-печки.


Взял несколько вариантов. Одна крышка поглубже диаметром 235 мм., другая не такая глубокая диаметром около 260 мм., но с бортиками.
Весят крышки приблизительно одинаково, около 100 грамм.

Для фиксации крышки на лучах взял клипсы для крепления пластиковых труб шестнадцатого диаметра.


Клипсы закрепил на крышке обычными пластиковыми хомутами. Как выяснилось, к бортикам удобно притягивать стяжками клипсы. Двух штук вполне достаточно.


Но для установки пары силовых батарей не хватает пространства по высоте, поэтому сделал крепления из уголков для глубокой крышки.


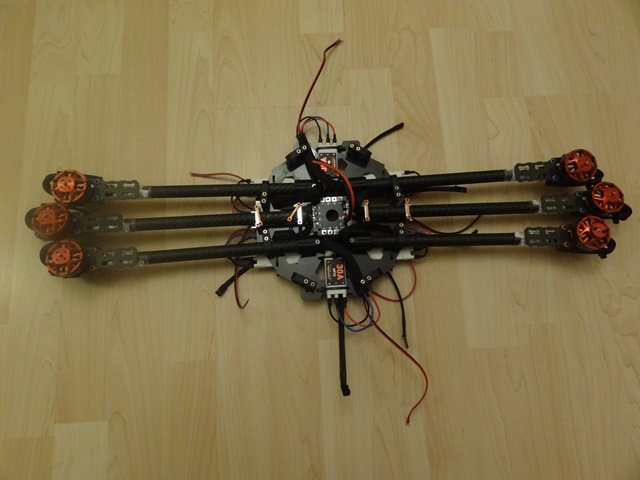
Ноги
На ноги все жалуются, поэтому сразу их переделал.
Толщину трубок стоек ног можно оценить по фотографии, та что слева из комплекта, я ее заменил запасной трубкой от луча. Укорачивать не стал, так как предполагаю цеплять большой подвес http://www.parkflyer.ru/38737/blogs/view_entry/2692/ .

Полозья также усилил и удлинил. В трубку полозьев вставил еще одну трубку. Чтобы задвинуть плотно одна в другую, обернул бумагой, полоски в пару сантиметров вполне достаточно.


Вместо резинок на полозья надел изоляцию для труб кондиционера. Идеально подошла изоляция для 8 мм труб. В магазине она стоит копейки.


При жестких посадках ноги могут сложиться, поэтому фиксирую их велкролентой. Ее же использую для фиксации ног при транспортировке, иначе они болтаются.


Пропеллеры при транспортировке фиксирую с помощью вспененного полиэтилена, иначе возможно повреждение кромок.

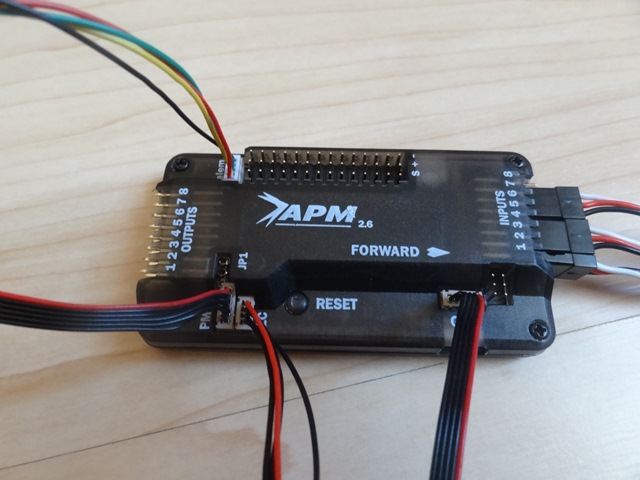
Мозг.
Полетный контроллер установил между двумя кусками поролона. Поролон взял от двух губок для мытья посуды. Контроллер держится плотно. Установить таким способом плату с разъемами сверху было бы проблематично. Другого места для контроллера не предусмотрено.

Для удобства подключения к контроллеру подписал управляющие провода от регуляторов. Под термоусадочную пленку поместил номера согласно схемы подключения для ArduCopter-a.

В версии 2.6 компас внешний, поэтому я постарался вынести его подальше от всей электроники. Для этого сделал специальный кронштейн, поэтому использовал вспененный полиэтилен. Приклеил на двухсторонний скотч и зафиксировал стяжками. Получилось гораздо легче, чем складной кронштейн.

Питание борта
Питание завел через приемник, для этого использовал регулятор напряжения Turnigy UBEC 26V 5A Устройство бортового питания Turnigy 5A (8-26v) SBEC для Lipo

Регулятор вполне справляется со своей задачей, напряжение выдает в допустимом пределе, просадок ниже 5 вольт не замечено.
Радиоуправление
Приемник установил Futaba R7008SB, он с функцией телеметрии. Поэтому припаял дополнительный провод к силовой батарее.
О самой системе радиоуправления можно почитать в моем дневнике
Обзор Futaba T14SG http://www.parkflyer.ru/38737/blogs/view_entry/1815/
Тест дальности Futaba T14SG http://www.parkflyer.ru/38737/blogs/view_entry/1957/
Телеметрия для вертолета. http://www.parkflyer.ru/38737/blogs/view_entry/1967/
GPS датчик SBS-01G. http://www.parkflyer.ru/38737/blogs/view_entry/2010/
Обновления для Futaba T14SG v2.0 http://www.parkflyer.ru/38737/blogs/view_entry/2198/
Обновления для Futaba T14SG v3.0 http://www.parkflyer.ru/38737/blogs/view_entry/2765/
Кстати, совсем недавно вышло очередное обновление четвертой версии, футаба наконец-то добавила коптер в список моделей. На экране теперь высвечивается такая пиктограмма.
Настройка
Считаю, что смысла подробно описывать процесс настройки нет, так как он был неоднократно продемонстрирован в статьях.
Дам только ссылку на статью http://www.parkflyer.ru/38737/blogs/view_entry/3263/ , в которой подробно изложено, как я на страивал коптер на базе ArduCopter-a.
Установлена прошивка версии 3.1.3, которая вышла в майские праздники. На предыдущую прошивку было много нареканий, на rcdesign-e об этом писали. Поэтому тестировать новый аппарат пришлось на свежей прошивке.
Предварительно выполнил compassmot. Результат порадовал, на 75% газа выдал 8%.
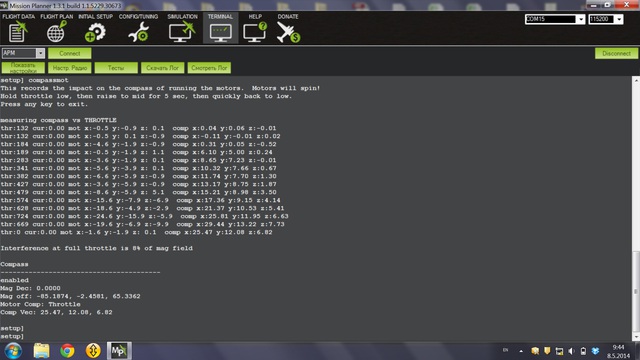
При первом полете коптер самопроизвольно медленно вращался, хотя калибровка компаса была выполнена, стороны света определял на ура. Оказалось, что в MissionPlanner-е не указано, что компас внешний. Произошло это по очень простой причине – выбираем внешний компас, переходим в другую вкладку, возвращаемся, а там галки напротив внешнего компаса нет. Вот и сохранилось не то, что нужно. Видимо программный глюк.
Также из разряда глюков программы MissionPlanner хочу отметить пропавший после обновления режим терминала. На другом компьютере терминал присутствует. Переустановка не помогла, скачал zip архив – при первом запуске терминал есть, а при втором запуске он пропадает безвозвратно. Изменить меню на продвинутое, как это сделано в APMPlanner2.0, не получается. Одним словом чудеса.
Первый полет
Не знал, как себя поведет коптер при первом запуске, тем более что пид-ы выставлены по умолчанию. Запуск выполнял в безветренную погоду. Честно сказать, такие холодные майские праздники были у нас впервые. Накануне выпало около десяти сантиметров снега. На видео я одет по зимнему, если бы знал, взял бы еще чехол для пульта.

В целом поведение коптера с базовыми настройками понравилось.
Никакой тряски, раскачки не наблюдалось, но было заметно не стабильное поведение при взлете и посадке. При порывах ветра наблюдалось нервозность в поведении модели.
Висит аппарат в режиме стабилизации при 50% газа. При добавлении газа коптер взмывает вверх, как будто он ничего не весит. Тяги хватает.
На одной 5000 мА батарее висит около 13 минут, причем в аккумуляторе еще оставалось около 30%.
Думаю, результат в 25 минут на паре аккумуляторов вполне достижим.
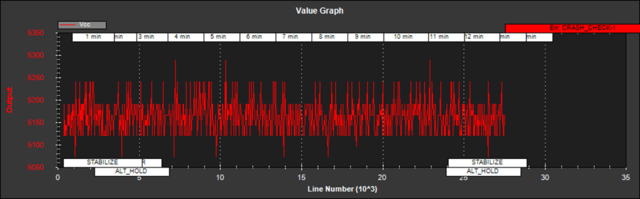
Автоматическая настройка пид-ов
Следующим этапом настройки было выполнение автоматической настройки AutoTune. С данной процедурой я столкнулся первый раз. Все оказалось очень просто. Назначаем на свободный канал AutoTune. Взлетаем, переходим в режим удержания высоты AltHold и включаем AutoTune. Коптер начинает наклоняться сначала вправо-влево, потом вперед-назад. После настройки садимся и дизармим, настройки запоминаются. Если не хотим запоминать новые настройки, то отключаем функцию и дизармим.
Процесс настройки не быстрый, особенно когда приходится возвращать коптер, так как улетает стремительно. Появилась мысль, что если батареи взять меньшей емкости, то может не хватить времени для настройки.
Полет с новыми пид-ами

Коптер с новыми пид-ами просто преобразился. Стал собранным, четким, как будто держится за воздух. Взлет и посадка теперь происходит как по рельсам. Поведение очень понравилось.
https://www.youtube.com/watch?v=79SywyFSYr8
Полет с подвесом
Установил подвес Tarot T-2D http://www.parkflyer.ru/38737/blogs/view_entry/3317/ .

Повозиться пришлось только с центром тяжести. При выносе подвеса вперед требуется противовес из аккумуляторов. Для крепления дополнительного оборудования буду использовать вот такие кронштейны, а площадки выпилю из текстолита.

С учетом прибавившегося веса поведение коптера существенно не изменилось. Дополнительную настройку не проводил.
Видео с коптера
Результат съемки понравился. Четкая картинка, желе не наблюдается. Горизонт не уплывает. Наклон камеры по питчу настроил на свободный восьмой канал.
Несколько фотографий сделанных с коптера.




В итоге хочу сказать, что ощущения от большой модели совершенно иные. Висит более стабильно, на ветер практически не реагирует. После автоматической настройки поведение гексокоптера очень нравится. Прекрасно висит в точке в режиме стабилизации, даже GPS не нужен.
При взлете и посадке нужно быть предельно аккуратным. На «куриных» ногах аппарат очень неустойчив. Взлетать нужно уверенно, добавив газку. Посадка плавная без провала, дабы не повредить ноги, да и завалиться при неаккуратном приземлении норовит, особенно если площадка не ровная.
Тестирования буду продолжать, первым делом в аппаратуре радиоуправления настрою экспоненты, чтобы не так резко реагировал на стики, видео будет более плавным. Хотелось бы убрать из кадра лучи при панорамной съемке, а при съемке земной поверхности — ноги. Безусловно качество съемки на порядок лучше, если сравнивать с тем, что мне удавалось сделать раньше .
Уже выполнено более десятка полетов. Неадекватного поведения на прошивке 3.1.3 не замечено. На данный момент через MissionPlanner доступна версия 3.1.4, но переходить на нее я пока не планирую, так как по заявлению разработчиков в ней только исправлена ошибка для Pixhawk.