



Прогресс не стоит на месте и на рынке контроллеров для радиоуправляемых летательных аппаратов появляются устройства с впечатляющим функционалом. Систему стабилизации полета 31AP, исходя из ее возможностей, можно смело назвать автопилотом. F-TEK 31AP Система стабилизации полета F-TEK 31AP и F-TEK OSD Combo является полным аналогом системы стабилизации полета FY-31AP от компании FeiYu-Tech. Следует отметить из отличительных особенностей от других систем полет в автоматическом режиме по 20 точкам, возврат домой и полет по кругу.

Данная система была приобретена несколько месяцев назад. Почта Сингапура «пешком» доставила посылку в мое отделение почты, поэтому пока собирал и настраивал, наступили майские праздники.
Систему установил на планер чешской фирмы TopModel ELECTRA PRO http://www.topmodel.fr/goodsdoc/0201201_time_1352905676.pdf Решение может быть спорное, но выбирать не из чего было. Как говорится, что имеется, с тем и экспериментирую.
Размах крыльев планера составляет 2,56 метра, длина 1,23 метра, вес 1,9 кг. Данный планер уже летал не один сезон, были и удачные полеты, были и «морковки». Поэтому носовая часть уже ремонтировалась и склеена из стеклоткани пропитанной эпоксидной смолой. Планер оснащен элеронами, закрылками, рулем направления и высоты, соответственно в нем шесть сервоприводов Hitec 82MG.
Силовая установка электрическая, бесколлекторный мотор Turnigy 3542 1250kv Бесколлекторный двигатель Turnigy D3542/5 1250KV со складным винтом 10×8 дюйма работает в паре с регулятором Turnigy SuperBrain 80A Turnigy Super Brain 80A Brushless ESC . Источником питания являются аккумуляторы Turnigy 2200 11.1v 25C Turnigy 2200mAh 3S 25C Lipo Батарея подключаются параллельно через самодельную колодку.
Питание борта осуществляется через регулятор напряжения Turnigy 5A (8-26v) SBEC Устройство бортового питания Turnigy 5A (8-26v) SBEC для Lipo Пока он тянет, но похоже, что скоро понадобится помощнее.

Система 31АР была установлена вначале на двухстороннюю липкую ленту, но из-за высокого уровня вибраций пришлось переделать на подушку из вспененной резины. Размещение выбрано под крылом (как рекомендуется) где центр тяжести модели. F-TEK OSD тоже расположился рядом, зафиксированный вспененным материалом. Пока полеты по FPV не предполагаются, поэтому OSD используется как логгер. Вся информация пишется на карту памяти microSD.

Приемник стандарта fasst Corona R8FA. Восьми каналов оказалось только-только, даже можно сказать не хватило для реализации всего потенциала имеющейся электроники.
GPS антенну приклеил на крыло двухсторонним скотчем. В комплекте имеется удлинитель, который позволяет снимать крыло не дергая каждый раз основной блок системы.

Компоновка получилась очень плотная, свободного места практически нет.
Что касается настройки, подключил все согласно инструкции http://www.feiyu-tech.com/download-en.php?id=38 . Выбрал тип самолета с помощью DIP переключателя, у меня классическая схема, таким образом все четыре переключателя находятся в положении выключено. Сервоприводы руля высоты и направления подключил к основному блоку. Для подключения элеронов использовал Y-кабель. Сервы установлены так, чтобы можно было их запараллелить на один канал. Провод от регулятора тоже подключил в основной блок, так как система сама регулирует уровень газа в автоматическом полете. Закрылки подключены сразу в приемник к 7 и 8 каналам.
При постройке модели необходимо сделать так, чтобы качалки сервоприводов были установлены в нулевые положения, а рабочие поверхности воздушных рулей были установлены в нейтральные положения. Все настройки нужно выполнять на горизонтальной поверхности.
На 5 и 6 канал назначил два трехпозиционных переключателя. Первый переключает между ручным режимом, стабилизацией и полетом по точкам. Второй позволяет включать полет по кругу или возврат домой.
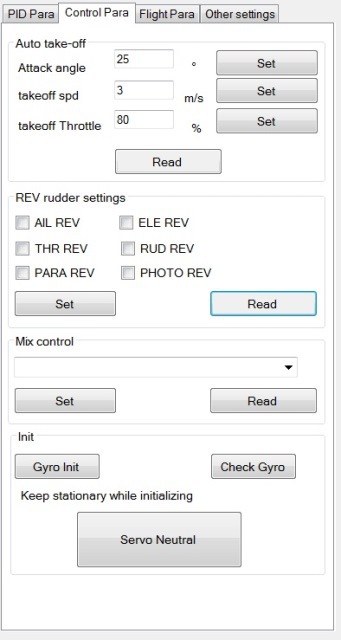
Для корректной работы в 31AP необходимо настроить реакции системы на внешнее воздействие с помощью потенциометров, работу проверяем в режиме стабилизации, отклоняя аппарат, наблюдаем за рабочими поверхностями. В аппаратуре радиоуправления настраиваем в ручном режиме реверсы и конечные точки, можно еще настроить экспоненты для более мягких реакций на ручках.
Важным этапом настройки является настройка горизонта в автопилоте. Включаем на DIP переключателе четвертый тумблер в положение ON. Подаем питание и с помощью передатчика переводим систему в режим полет по кругу ждем пару секунд, после чего переводим 4 переключатель в положение OFF. Теперь горизонт настроен.
Очень важно настроить режим файл-сайф. Для того чтобы самолет при потере сигнала не терял тягу, рекомендуется для канала газа установить значение около 50%, и для активации возврата в точку взлета для 6 канала — 100%. Проверяем без воздушного винта потерю сигнала, отключив питание передатчика.
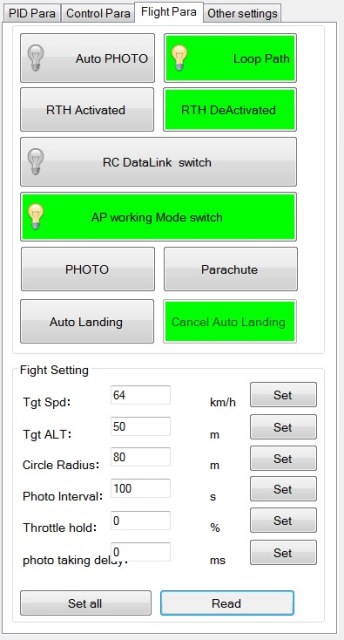
Более тонкие настройки автопилота можно выполнить через компьютер.


USB-кабель идет в комплекте с системой, с помощью него можно обновлять прошивку автопилота и osd. Для этого нужно скачать из интернета программное обеспечение http://www.feiyu-tech.com/download-en.php?id=64. Соответственно сами прошивки находятся тут http://www.feiyu-tech.com/download-en.php?id=54. Подробная инструкция по прошивке идет вместе с софтом.

Наземных станций существует несколько версий 3, 4 и 3D. Скачать все необходимое можно тут http://www.feiyu-tech.com/download-en.php?id=43.
У меня установлена и та и другая версия, функционалом они практически не отличаются, но внешне мне больше нравится 3DFYGCS.
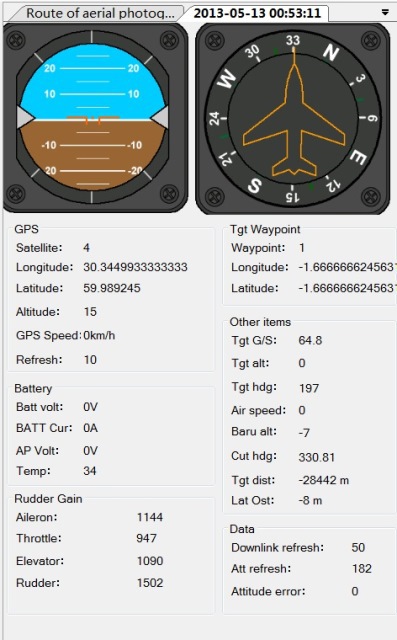
Log-файл, который записывает встроенный логгер в F-TEK OSD, можно загрузить в наземную станцию и просмотреть полет.
Либо воспользовавшись бесплатным сервисом http://bobosch.dyndns.org/fpv/, сконвертировать данные для просмотра на картах Google или в формат CSV для просмотра в Microsoft Excel.

Для передачи телеметрии в реальном времени заказал радиомодемы на 915 MHz Набор для FPV телеметрии — 915Mhz

Пришлось разбираться в настройках модемов. Первое, что нужно сделать, так это проверить расположение в разъеме проводов питания, передачи и приема сигнала. После установки соответствующего ПО http://www.rctimer.com/download/RCTIMER_Radio.rar выяснилось, что в модулях разные версии прошивок, в наземном модуле v1.6, а в воздушном 1.5. Пришлось перепрошить на более новую версию. Настройки сделал следующие.
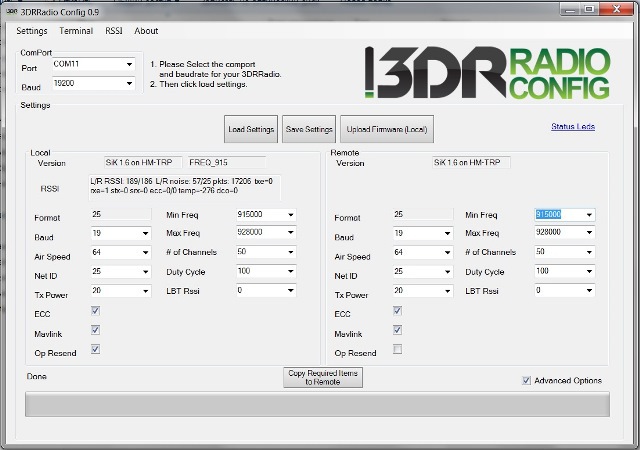
Диаграмма RSSI позволяет проанализировать уровень получаемого радиосигнала и шумов как наземной станции, так и бортовым модемом.

Уровень сигнала получаемого наземным модемом обозначен rssi local, бортовым модемом — rssi remote. Уровень шума получаемого наземным модемом обозначен noise local, бортовым модемом — noise remote.
Наибольшие значения дальности могут быть достигнуты при высоком уровне сигнала и минимальном уровне шума. На диаграмме видно, что уровень шумов у бортового модема ниже чем у наземного. Бортовое оборудование может создавать существенные помехи радиомодему. Опытным путем можно выявить источник шумов, отключая и перемещая электронику.
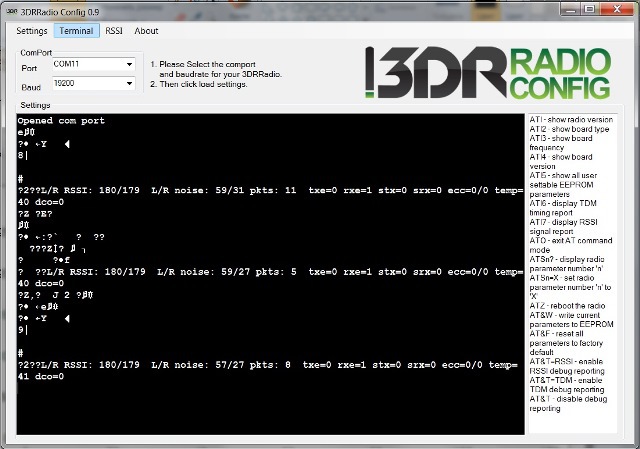
После правильной настройки через терминал стало видно, что данные пошли корректно. Важно выбрать в настройках модемов и в программе одинаковую скорость 19200 бит/сек.
GCS увидела 31AP и все заработало на столе. Теперь можно устанавливать в самолет.
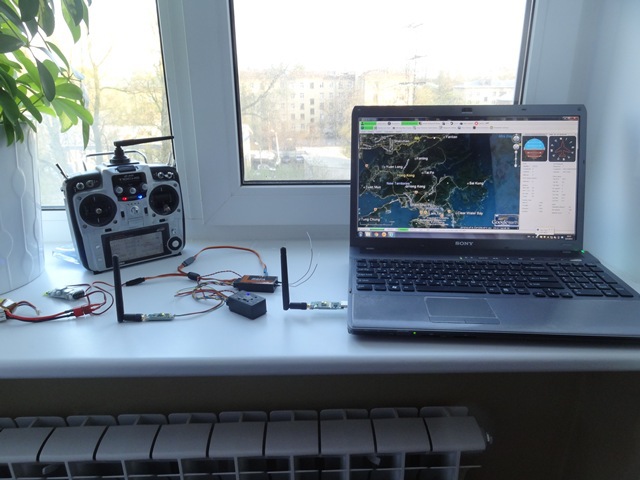
Модемы имеют очень компактные размеры, они без корпусов, поэтому рекомендую их упаковать в термоусадочную пленку, чтобы избежать замыкания с другой электроникой.
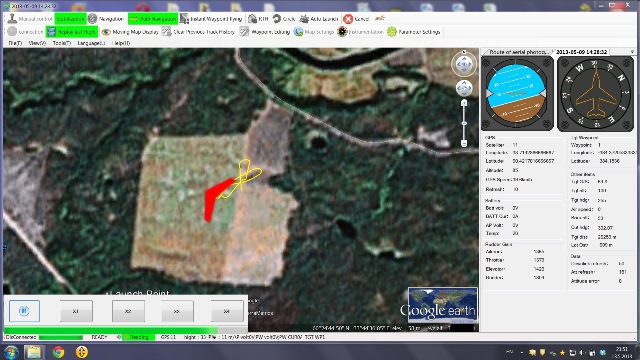
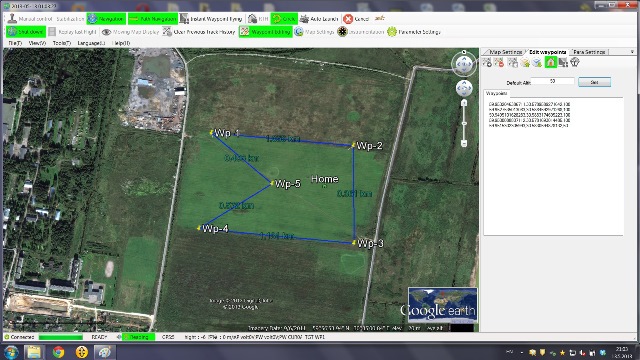
Программирование маршрута автоматического полета по точкам осуществляется через наземную станцию. В окне Edit waypoint устанавливаем требуемое значение высоты полета и после этого на карте расставляем точки, их может быть до 20 при условии, что у вас последняя прошивка. Также можно назначить точку Home, она может отличаться от точки взлета.
Первый тестовый полет с новой системой показал следующее. Взлет в режиме стабилизации как по рельсам. Полет стабильный ровный, если корректно выставлен горизонт в автопилоте. У меня планер немного уходил налево и вниз, приходилось подруливать, после повторной настройки все пришло в норму. В ручном режиме система полностью отключается.
Полет по кругу выполняется на заданной высоте с определенным радиусом. По умолчанию высота задана 50 метров, а радиус круга 80 метров. Круги получаются ровные, но при порывистом ветре был замечен снос с траектории. У меня самолет летал против часовой стрелки, удерживая заданную высоту.
Возврат на точку взлета тоже радует четкой работой, отпускал модель подальше и включал возврат домой. Аппарат незамедлительно разворачивался и безошибочно выбирал направление. После достижения точки взлета, кружил над ней.
Система 31АР оставила положительные впечатления. Следует отметить, что система является законченным продуктом, установка на летательный аппарат достаточно простая. 31 AP обладает богатым функционалом, превращая радиоуправляемую модель в беспилотный летательный аппарат. Но есть и минусы, система боится вибраций, а также есть проблемы с установкой программного обеспечения GCS наземной станции, так как оно работает с рядом модулей и плагинов.