




Для постройки своего первого коптера выбрал комплект от компании DJI, но без полетного контроллера. Сначала предполагал заказать комплектующие и из них собирать, но изучив много информации, выяснил, что есть масса подводных камней. Данный сетап проверен временем и достаточно неприхотлив. Почему гекса, а не квадрокоптер? Предполагал навесить некоторое оборудование и квадрик мне показался для этого мал. Соответственно контроллер решил поставить на открытом коде, но не буду раньше времени забегать вперед и расскажу все по порядку.
Заказ оформил на Espritmodel через Паркфлаер DJINAZA550 — DJI Naza Flame Wheel F550 DJI Naza Flame Wheel F550 ARF Приехало все достаточно быстро. Красивая коробка с качественной полиграфией и голографическими надписями.
В коробке все разложено по пакетикам.

Пропеллеры с запасом — аж 4 пары прямого и обратного вращения на 8 и 10 дюймов. Лучи в комплекте белые и два красных. Регуляторы упакованы парами. Моторы каждый в отдельном пакетике. Вроде бы все, что нужно есть в комплекте.

Распаковывая детали и тщательно рассматривая каждую, заметил несоответствие маркировки регулятора и цвета проводов.

Данный казус некоторым образом озадачил, называется такое «не верь глазам своим». Перепутали цвет проводов? Что будет, если неверно включу?
Но сравнив с другими, понял, что этикетка приклеена на другую сторону.
Питание у F550 разведено на нижней пластине. Все контакты подписаны и хорошо паяются.

Регуляторы крепятся прямо к лучам.
Провод к силовой батарее одел в чулок, чтобы избежать повреждения изоляции и замыкания, так как он будет постоянно касаться одной из половин рамы.

Винты заворачиваются очень плотно. Фиксатор резьбы использовать не требуется.
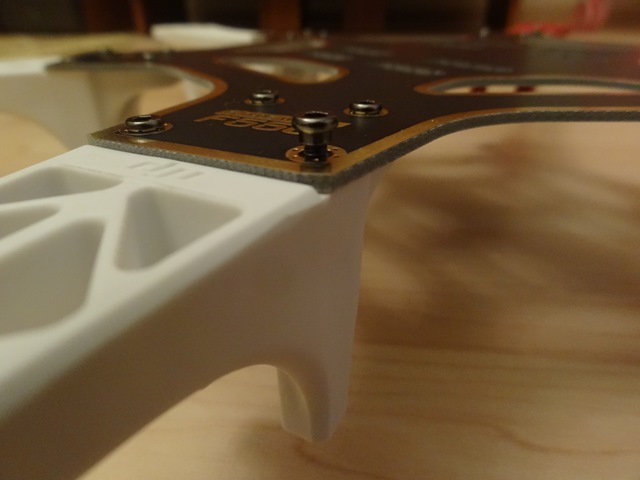
Качество винтов понравилось. Шестигранник вставляется плотно, шлицы не срываются.
Регуляторы зафиксировал стяжками к нижней стороне лучей.

Одной стяжки по центру мне показалось мало. Я установил на две по краям.
Моторы 2212 920кв. Выглядят очень маленькими.

Так как мой сетап предполагался под аккумуляторы 3S, то пропеллеры будут десятидюймовые. Соответственно под 4S рекомендуется устанавливать пропеллеры 8 дюймов. На самих моторах есть напоминание об этом.
Кстати наклейка с маркировкой на мотор приклеена не полностью по кругу, а только до половины, что вносит дисбаланс в работу мотора, особенно это проявляется на низких оборотах. Предполагаю оторвать наклейки. На старшей модели s800 данная операция позволила снизить уровень вибраций, а что уж говорить про такие маленькие моторчики 2212.
Посадочные места в площадках 19 х 16 мм, мотор фиксируется на четыре 3-х мм винта. Стопорная шайба для тянущего привода не лучшее решение, по мне так стопорное кольцо надежнее. Провода от мотора пропустил сквозь отверстия в лучах.

Далее установка электроники. В качестве мозга выбрал AIOP V2.0 вот такой Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) .
Тут меня многие могут покритиковать и не одобрить мой выбор. Дескать, взял бы назу и не знал бы проблем, зачем связался с контроллером на открытом коде. Но тут ничего не поделаешь, сыграли два аргумента. Первый и наверно самый главный это функционал, второй – цена, даже наза лайт стоит вдвое дороже контроллера aiop c gps-ом и телеметрией.
Но когда стал заказывать, то с HobbyKing-ом стали происходить невероятные вещи с отправкой заказов. Вовремя я сориентировался и заказал такую плату в интернет-магазине RCTimer http://www.rctimer.com/product_765.html .

Заодним и GPS-модуль взял http://www.rctimer.com/product_763.html . Приехала электроника очень быстро, доставка была выбрана самая дешевая.

Провода из комплекта поставки очень пригодились, если бы их не было в комплекте, не знаю, как бы я подключал телеметрию и gps.

Инструкция на плату располагается тут http://www.rctimer.com/download/Crius_AIOP_Manual_MWC.pdf .
Антенну GPS затянул в термоусадочную пленку.
Так как регуляторы без встроенного бека, о чем свидетельствует крупная надпись OPTO, то на питание борта поставил BEC от Turnigy.
Телеметрия у меня уже была, требовалось только ее подключить.
GPS антенну и радиомодем для телеметрии подключил к последовательному разъему (Serial Port 1,2,3) . Из восьми пинового разъема вытащил все провода и установил свои.
Соответственно GPS антенну подключил ко второму порту, питание взял с него же, а телеметрию к третьему. Запитал телеметрию от Serial Port 0/FTDI.
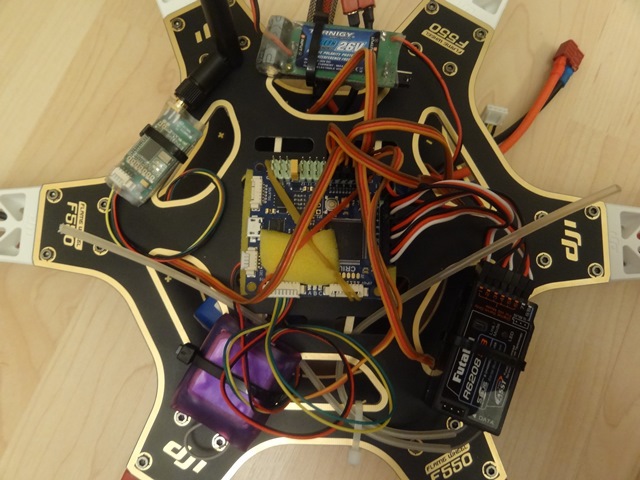
Всю электронику пока разместил на верхней пластине, когда все настрою, то перенесу уже внутрь рамы.
Контроллер AIOP разместил по центру, в качестве виброразвязки под него положил поролон, а зафиксировал с помощью двух резинок натянутых по диагонали. С обратной стороны в концы резинок пропустил по зубочистке. Барометр удалось закрыть кусочком поролона и зафиксировать все теми же резинками.
Приемник 6208 снял с другой модели и подключил, прилагаемыми проводами.
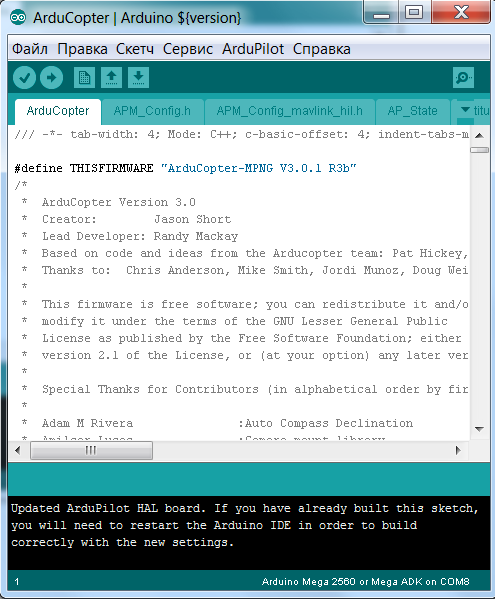
Внутри мозга оказалось пусто. Поэтому приступил к заливке прошивки на базе Arducopter-a. Для этого с помощью среды разработки Arduino IDE производил ряд операций, которые были тут уже достаточно подробно описаны. Мне очень помогла разобраться с прошивкой статья Тимура Ганиева «Шаг за шагом за пиратом!» http://www.parkflyer.ru/38737/blogs/view_entry/2608/ . Конечно получилось все не с первого раза, но потратив немного времени во всем разобрался. Главное делать все внимательно.
Удалось залить прошивку Arducopter-MPNG V3.0.1 R3b. Предыдущая версия не видела датчиков, я никак не мог откалибровать акселерометры и компас.
После очередной прошивки плата не видела сигнал с приемника, калибровка не работала.
Поискав в интернете на форуме http://diydrones.com/forum нашел информацию, как сделать, чтобы заработало радиоуправление.
В файле с именем RCInput_MPNG.cpp ( у меня он располагается на C:\ardupilot-mpng\libraries\AP_HAL_MPNG\RCInput_MPNG.cpp ) я изменил значение у параметра SERIAL_PPM.
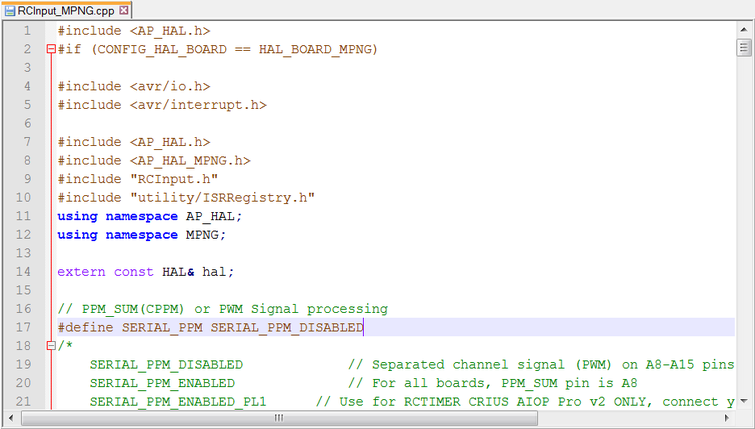
По умолчанию было установлено значение ENABLED для подключения одним проводом PPM-SUM, заменил на DISABLED для передачи PWM сигнала.
После успешной прошивки платы, приступил к калибровке компаса, акселерометров и входного сигнала с приемника. Все калибровки удалось пройти с первого раза.
Регуляторы подключил к соответствующим разъемам на плате. Не забываем соблюдать нумерацию при подключении. Будьте внимательны, номер мотора на схеме соответствует нумерации разъемов на плате.
И вот настал процесс калибровки регуляторов. Ручка газа на максимум — шесть регуляторов дружно подают голос, ручку на минимум – звуковой сигнал, все регуляторы откалиброваны.
Наконец-то пробный пуск, оба стика тяну вниз друг к другу и после появления сообщения ARMED, запускаю двигатели, все работает.
Проверяю направление вращения пропеллеров, согласно выбранной схемы для гексокоптера.
На нескольких моторах направление вращения пришлось поменять, переключив в другой последовательности провода, идущие от мотора к регулятору. Для проверки удобно использовать листок бумаги, поднося к вращающемуся ротору, листок загибается по направлению вращения.
Далее пробный запуск и проверка поведения аппарата на движение стиков. Тут-то все и началось. Коптер начал раскачиваться, наращивая амплитуду движения, и норовил кувырнуться. Без настройки ПИДов (PID) не обойтись.
В интернете прочитал инструкцию по настройке ПИД-ов http://diydrones.com/forum/topics/arducopter-tuning-guide , буду пробовать.
Для настройки в помещении сделал растяжку между двух столов. Если кратко, то вся инструкция сводится к нескольким шагам.
1.Выполняем первоначальную настройку rate_P
2.Настраиваем rate_D
3.Возвращаемся к rate_P и настраиваем еще более точно
4.Переходим к настройке rate_I
5.Далее уже на улице в безветренную погоду или в зале для stab_p выбираем 3.0 и настраиваем rate_I и stab_p в полете, по желанию, можно настроить и другие параметры, чтобы получить требуемое поведение аппарата, но это делается только после базовых настроек.
Мои настройки получились следующие:
Stabilize Roll/Pitch P= 3.5,
Rate Roll/Pitch P=0.104 I=0.0 D=0.004
Остальные параметры оставил пока по умолчанию.
В итоге хочу сказать следующее:
Комплект для сборки оставил приятные впечатления, качество материалов и комплектующих на высоте. Если это первая модель то думаю, что она не разочарует и доставит удовольствие от сборки, настройки и полетов. Был конечно ляп с наклейкой на регуляторе, но кто-то мог этого не заметить. Наклейки на моторах считаю лишними, стикеры имеют достаточно большую толщину и создают дисбаланс при вращении крошечных моторчиков.
С электроникой мне пришлось повозиться, но оно того стоило. После длительных настроек у меня получился аппарат с очень широким функционалом, самое интересное это полет по точкам в полностью автоматическом режиме начиная от взлета до посадки.