




Мои попытки сделать фотографии завершились неудачей, в кадре постоянно присутствовали полозья шасси. Даже уменьшив угол съемки, при маневрах мелькали ноги. Эта причина послужила для проработки вопроса складывания шасси в полете.
В продаже существуют уже и готовые решения, приведу несколько ссылок.
http://www.rctimer.com/product_1086.html
http://www.foxtechfpv.com/foxtech-pivot-landing-gearone-sidepreorder-p-1434.html
http://www.fpvmodel.com/remote-control-folding-retractable-carbon-fiber-landing-skid-for-fpv-multirotor_g501.html
Конечно стоимость готовых решений достаточно высокая. На основе сервоприводов конструкция сложнее, соответственно и более дорогая.
Конструкция, основанная на сервоприводах, требует системы рычагов, которые бы надежно фиксировали стойки шасси в крайних положениях и не создавали нагрузки на редукторы сервоприводов.
Поэтому я решил делать на основе ретрактов. Это наиболее простой способ реализации.
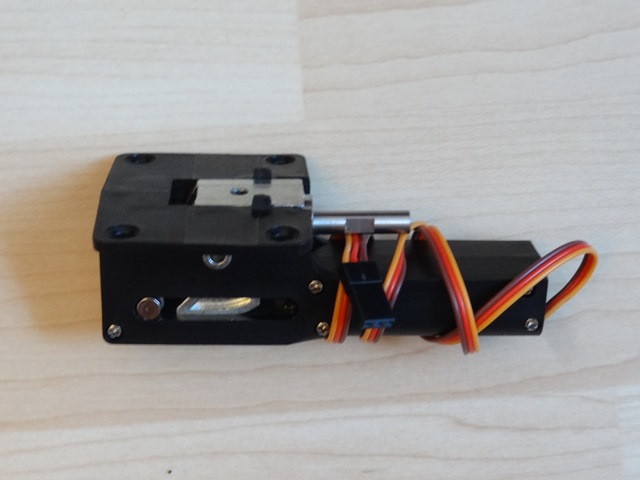
При заказе аккумуляторов с европейского склада HobbyKing-а оставалось место в посылке, выбор пал на имеющиеся в наличии ретракты Комплект серворектрактов для больших моделей (размер 51мм x 43мм) (2шт.) .
Стоимость пары составляет около 1000 рублей. Конечно, существуют более дешевые, но на европейском складе выбор не такой широкий, как на китайском, а из подходящих были только такие.
Оптимальным вариантом, конечно, были бы на 5 кг вот такие Комплект серворектрактов (размер 44мм x 41мм) (2шт.) но мне пришлось взять приводы, рассчитанные на 10 кг. Преимуществом данных ретрактов является металлический поворотный узел со стержнем 5 мм.
Оставалось теперь только их установить. Крепить решил вместо стандартных креплений, для этого использовал алюминиевый уголок 40х20 мм и толщиной 2 мм.

Из уголка напилил четыре заготовки длинной по 10 сантиметров.

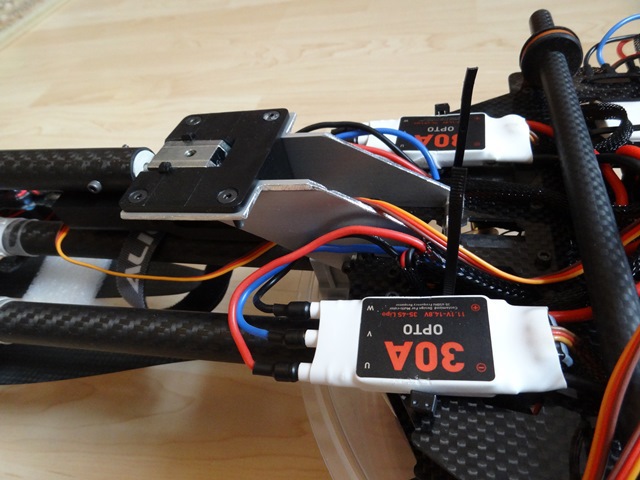
В результате примерки выяснилось, что ретракт упирается в луч, оказалось, что угол слишком большой. Пришлось переделать, в итоге площадки получились почти параллельно раме.
После этого облегчил кронштейны, отпилив весь лишний металл.



После постепенных улучшений получилась вот такая деталь.

Вес одной составляет чуть больше 11 грамм. Соответственно пара весит 23 грамма.


Можно и еще облегчить, но этим займусь после полетных испытаний.
Кронштейны сделать оказалось самым простым, теперь нужно было установить стойки для ног.
Крепление в виде стакана на трубку однозначно не подходило, поэтому оставалось придумать, как закрепить ось внутри стойки. Самое простое – это вклеить на эпоксидную смолу 5мм штыри. Более интересным решением будет сделать адаптеры с 14 мм на 5 мм. Мне удалось подобрать пластиковые втулки подходящего размера. Чтобы втулки плотно вставлялись в трубку, накрутил на каждую по витку изоленты. Внутри втулки отверстие уже было, за соосность переживать не стоит.
В качестве 5 мм стержня использовал строительные гвозди.

Гвоздь использую со стороны шляпки. Такая конструкция позволяет при необходимости без труда вынуть втулку из трубки. Для надежной фиксации втулки и стержня просверлил отверстие 2,5 мм под винт.

В трубке ноги отверстие было от предыдущего крепления поворотного механизма.

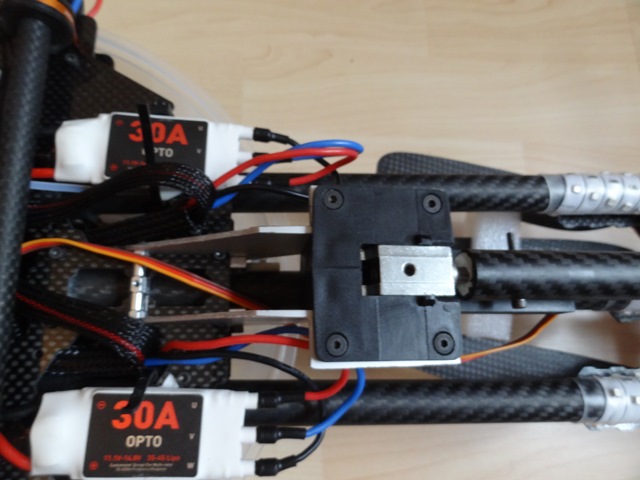
В собранном виде конструкция выглядит следующим образом.


Проверка работы ретрактов в домашних условиях выполнялась с помощью сервотестера.
Оба механизма подключил через обычный Y-кабель, питание 5 вольт подал через регулятор напряжения.

Вот небольшое тестовое видео проверки работы ретрактов
Следующим этапом было подключение ретрактов непосредственно к приемнику на отдельный канал и проверка работы в полете. Все прошло без происшествий.
https://www.youtube.com/watch?v=k1oZP-k5siM
В полете видно, что полозья шасси немного болтаются, связано это с тем, что отверстие в штифтах оказалось немного больше чем фиксирующий винт. Сейчас этот неприятный момент устранил, просверлив новые отверстия, благо гвоздей много.
При посадке стойки шасси расположены строго вертикально, так как площадки получились параллельно раме, а угол выпуска шасси составляет 90 градусов. Расстояние между ногами составляет 300 мм. При посадке нужна сноровка, коптер не очень устойчив.


Немного усовершенствовал конструкцию, изменил угол установки ретрактов, подложив по гайке М4,. Таким образом удалось достигнуть расстояния между полозьями шасси 380 мм. При взлете и посадке коптер стал более устойчивым.
Попробовал автоматическую посадку, остался очень доволен.
Управлял с планшета через DroidPlanner2.0. Взлет в ручном режиме, далее убираю ноги, немного летаю, выпускаю шасси и в программе активирую возврат домой с автоматической посадкой (RTL), коптер очень плавно снижается, коснувшись земли, выключает двигатели, при этом стик газа должен быть в нижнем положении (0%). Если стик не в нижнем положении, то двигатели продолжают вращаться на минимальных оборотах. Все происходит предсказуемо, плавно, без подпрыгиваний для корректировок положения.
Пока электронику настроил следующим образом. Выпуск шасси вывел на восьмой канал приемника. На случай пропадания сигнала в приемнике настроил Failsafe. При непредвиденной ситуации происходит возврат домой и выпуск стоек шасси одновременно.
В целом все понравилось. Особенно радует стоимость мероприятия. Готовое решение предлагается ориентировочно за 150 долларов, цена пары ретрактов с Хоббикинга – от 20 до 30, с rctimer-а и того дешевле с бесплатной доставкой http://www.rctimer.com/product_716.html , правда еще требуется приложить руки.
Кто собирется делать подобную конструкцию, рекомендую взять ретракты на 5 кг, они компактнее и легче, каждый весит 72 грамма. Экономия в весе с пары ретрактов уже получается существенная.
Конечно, хотелось бы еще уменьшить угол отклонения ретрактов, скажем до 75 — 80 градусов. Я вышел из положения и подложил шайбы, но это временное решение, буду переделывать и облегчать кронштейны. Также предполагаю выточить втулку с 5 мм штифтом из алюминия, это позволит облегчить конструкцию еще немного.
На данный момент прорабатываю, как сделать выпуск шасси непосредственно по сигналу с автопилота для реализации автономного полета.