




Достаточно давно интересуюсь вопросом стабилизации камеры для фото и видео съемки. Были эксперименты с различными виброразвязками, а также с применением сервоприводов, но в последствии опытным путем выяснилось, что все это не то. С появлением в продаже систем на бесколлекторных моторах присматривался к ним и вот взял для стабилизации камеры двухосевой подвес.
Заказывал комплектом — подвес с контроллером. Выбирать было достаточно просто, главное требование к подвесу сводилось к возможности установить 200-300 граммовый фотоаппарат. Для этих целей не так уж и много предложений, тем более за разумные деньги. Выбор пал на подвес от ASP и контроллер BGC на подобии этого Двух осевой стабилизатор Gimbal-подвеса видеокамеры, для применения с бесколлекторными двигателями
На выбор предлагалось два цвета: черный или синий. Честно сказать, синий на летательном аппарате будет выглядеть «ляповато», поэтому однозначно выбрал крашеный черной краской.

Содержимое коробки разложено по пакетикам. В большом пакете находятся все металлические элементы конструкции. Отдельно пакет с демпферами. Упаковка с крепежом содержит несколько пакетиков с винтами разных размеров. Моторы были завернуты в упаковочный материал, провода находились отдельно, их нужно припаивать самому. Две пластины из текстолита, оклеенные под карбон, были уложены на дно коробки. И самое главное, контроллер BGC Brushless Gimbal Controller в запаянном пакете. Вот и все содержимое коробки. Общий вес деталей в упаковке составил 661 грамм.
На фото представлены все элементы конструкции.

Моторы впечатляют. Данный подвес комплектуется моторами GBM 5010 14N12.

Мотор намотан проводом 0.21мм, витков 150, сопротивление 14.65 Ом.

Приступим к сборке. В связи с тем, что подвес изготовлен из металла, то обязательно используем фиксатор резьбовых соединений. Элементы задвигаются один в другой и фиксируются винтами.
Инструкции по сборке в упаковке с деталями не было, в Интернете тоже не нашел, поэтому собирал по фотографиям из сети.
Собрал три кронштейна.

Последовательно установил двигатели.
На двигатель, отвечающий за Pitch, предварительно установил адаптер.

Паяем провода. Я припаивал (если смотреть на мотор как на фотографии) — слева на право коричневый, красный, желтый.

Виброразвязка состоит из двух пластин, соединенных между собой двенадцатью демпферами.

Демпферы из тоненького силикона, эластичные, в посадочных отверстиях сидят надежно, не болтаются.
Демпферы работают на сжатие, поэтому монтажные стойки проходят через технологические отверстия в пластинах, а уже к стойкам осуществляется монтаж подвеса и самой платформы к летательному аппарату.

Механика в сборе с камерой выглядит достаточно симпатично.

Следующий этап сборки заключается в установке электроники.
Контроллер, как я уже говорил, взял 2-Axis Brushless Gimbal Controller & IMU v1.0.

Разъемы к нему уже припаяны. Провод к гироскопу достаточно тонкий и мягкий. Смущают только разъемы, которые не достаточно плотно держатся в гнездах и выскакивают, если случайно дернуть за провода.
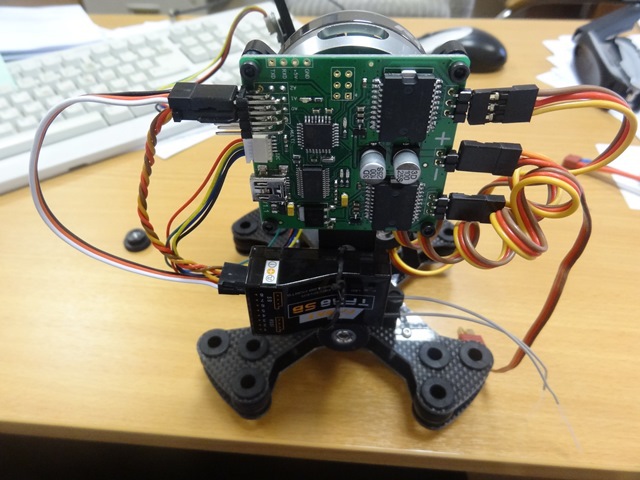
На кронштейне за мотором по оси Roll располагается площадка для крепления контроллера. Под винты мне пришлось подложить изоляционные шайбы, так как с одной стороны на печатной плате близко к крепежному отверстию проходит печатный монтаж.

Датчик расположился на основании площадки под камеру. Для его крепления предусмотрены отверстия. Винты прилагаются.

Разъем питания в виде двух торчащих контактов. Не предусмотрено никакой защелки фиксатора. На плате возле разъема нанесены крупно + и -. На форумах много сообщений, связанных с неправильным подключением, из-за чего контроллеры выходят из строя, электронной защиты никакой нет.
Питание платы заявлено от 2s до 6s. Я решил питать от аккумулятора 3s.
Подключил приемник к контактам подписанным на контроллере А1 и А2. Регулировку углов наклона вывел на крутилки.
С официальной странички скачал новую версию программы http://code.google.com/p/brushless-gimbal/downloads/list
Подключил контроллер к компьютеру через USB провод, драйвера установились автоматически, com-порт появился в диспетчере устройств. Но запустив программу, увидел, что результат оказался нулевой.
Поиск информации в Интернете показал, что есть схожие проблемы, которые сводятся к переустановке драйверов http://www.ftdichip.com/Drivers/VCP.htm . Но данная мера не принесла мне положительных результатов. Перепробовал разные версии драйверов, но программа не видела контроллера.
Перепрошить, согласно этой инструкции — http://www.rctimer.com/download/BGC-Manual.pdf, тоже не удалось.
Arduino IDE выдает ошибки и не прошивает. Как стало уже потом ясно, нужно залить еще специальный — bootloader.
Потеряв надежду, решил попробовать более раннюю версию, скачал BETA Version 048 incl GUI. Кстати на страничке с перечнем версий прошивок, только бета версии, как будто стабильно рабочей версии так и не было за все время. После нажатия кнопки connect поле статуса наконец-то стало зеленого цвета.
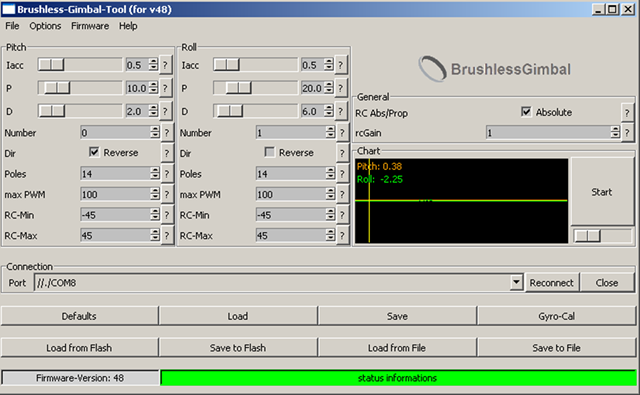
GUI показал, что в память платы загружена 48-ая версия программного обеспечения. Все настройки контроллера по умолчанию на скриншоте экрана.
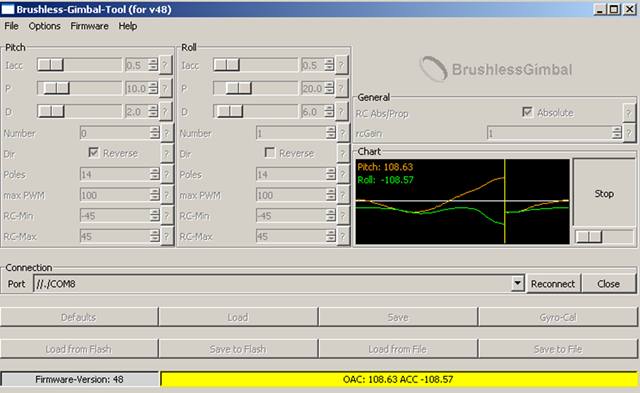
После нажатия кнопки Start в окне графики Chart видно, что данные с датчиков по осям Pitch и Roll поступают. На экране появились две кривые.
Теперь можно попробовать подвес в действии. Подключив питание, контроллер инициализируется, вращаясь переменно по каждой оси, после чего выравнивается в горизонт. Чтобы попробовать, подвес положил на столе в перевернутом положении. Установил камеру и уравновесил с учетом уже установленной камеры. Регулировка осуществляется за счет изменения длины плеча у кронштейнов.
Как потом выяснилось, провода припаял и подключил правильно с первого раза, ничего не пришлось менять.
Вот что у меня получилось на заводских установках.
https://www.youtube.com/watch?v=axNSgd8vCs8
В итоге хочу сделать следующие выводы:
В целом данный комплект произвел положительное впечатление.
Подвес сделан качественно, детали точно обработаны и легко собираются. Покраска деталей оставляет приятные впечатления. Крепеж по размеру разложен по пакетикам, причем количество винтов с большим запасом.
Пришлось немного повозиться с программным обеспечением. Пока использую 48 версию. Для смены прошивки, по всей видимости, требуется программатор, которого у меня пока нет.
Контроллер пока работает с настройками по умолчанию. По оси Pitch подвес отрабатывает не так, как хотелось, на моем тестовом видео это отчетливо видно, требуется дополнительная настройка параметров PID в GUI.
Отрабатывает система очень плавно, при записи видео нет рывков и запаздываний, присущих сервоприводам.
Вес конструкции вместе с камерой, но без аккумулятора, получился около 750 грамм. Если добавить 12 вольтовый 3s аккумулятор, то вес уже приблизится к килограмму.
Из недостатков данного подвеса отмечу, что гироскоп размещен на основании и ничем не закрыт, предполагаю перенести его в другое место или сделать защиту. Да и контроллеру не помешал бы корпус или, например, попробовать его установить на основание виброразвязки.