



Продолжительность полетов моих мультироторных моделей составляет около тринадцати минут, что для висения и легких пролетов достаточно много, порой даже надоедает бесцельное «болтание» в воздухе. Но когда запускаешь летательный аппарат для выполнения полетного задания по маршруту, то этого времени становится мало. Такое ощущение, что ход времени ускоряется и заряд силовой батареи тает на глазах.

Сразу скажу, что у меня главной целью при выполнении полетного задания является аэрофотосъемка, для выполнения производственных задач связанных с картографией. Тут есть свои особенности, нежели при получении панорамных снимков красивых видов.
Изучая вопрос, хотелось достигнуть 30-45 минут полета. На данный момент 20-25 минут полета достигается без особых проблем с применением стандартных комплектующих. Более продолжительное время полета возможно получить за счет дорогостоящих моторов, пропеллеров, сборок аккумуляторных батарей.
В сети Интернет достаточно много размещено видео с рекордами продолжительности полета мульти-роторных систем, а также на форумах идут дискуссии по этому поводу, многие из них вызывают сомнения, так как противоречат элементарным законам физики. В сети это называется фейком или по-нашему просто обманом.
Первым делом определился с рамой. Будет квадрокоптер на базе Tarot FY650. Многие могут меня покритиковать за этот выбор, дескать тяжелая. Но я делал вполне осознанный выбор. Во-первых, у меня уже есть FY680 и взаимозаменяемость узлов не маловажный фактор. Во-вторых, складная конструкция упрощает транспортировку, без лопастей вся модель помещается в большой пакет из супермаркета.
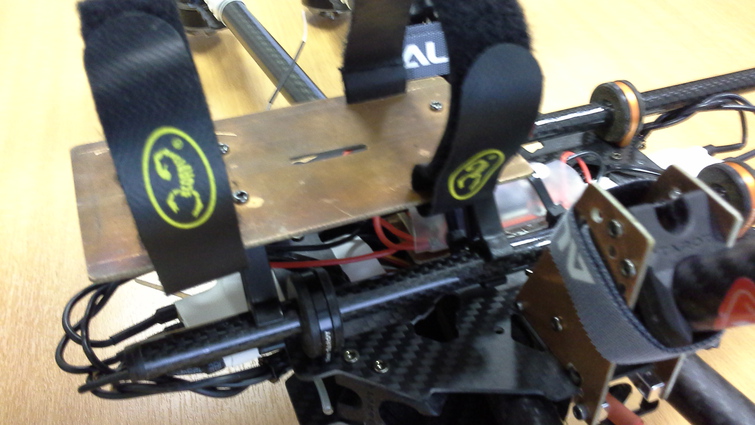
Полетный контроллер APM, о котором я уже не раз писал в своем дневнике. Установить пришлось вот на такую этажерку, иначе были наводки на компасс, висеть коптер в режиме лойтер просто отказывался.

Самой главной проблемой оказалось правильно подобрать ВМГ. Верить калькуляторам бесполезно, расхождение расчетных данных от вычисленных в калькуляторе порой значительное. К тому же не каждый сайт производителя указывает о своей продукции необходимую информацию для расчетов. Зачастую моделист вынужден опытным путем подбирать комплектующие, проводить тесты, постепенно приближаясь к поставленной цели. Но не каждый может себе позволить купить несколько комплектов моторов и винтов для выявления «идеального сетапа».
Выбранная рама позволяет установить 17 дюймовые пропеллеры без каких-либо изменений конструкции. На них и решил ориентироваться.
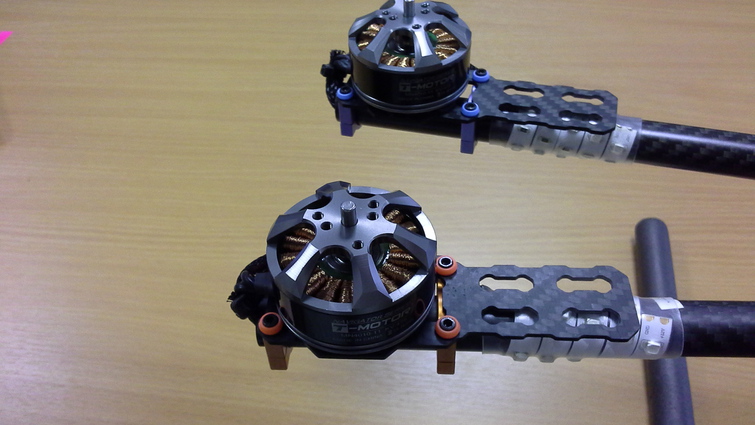
Соответственно, такие пропеллеры подразумевают моторы как минимум 4000 серии с количеством оборотов на вольт в пределах от 400 до 500. Выбор моторов с такими характеристиками сужается до нескольких штук. Я рассматривал Sunnysky v4010-450kV и T-Motor MN4010-475kV. По деньгам оказались эти моторы в одной ценовой категории и мой выбор пал без сомнений на зарекомендовавший себя бренд T-Motor. Тем более, в свое время столкнулся с некоторыми нюансами по установке на моторы Sunnysky пропеллеров T-Style. Центральное отверстие и отверстия под крепежные винты на пропеллерах были значительно больше, чем предусмотренное крепление со стороны мотора.
С регуляторами тоже все не просто. Например, с регуляторами DJI 30A Opto у меня проблем не было выявлено, они зарекомендовали себя только с лучшей стороны. Читая форумы, замечаешь, что многие сталкиваются со срывом синхронизации, в связи с этим приходится прошивать контроллеры скорости альтернативными прошивками. Честно сказать не хотелось заниматься экспериментами, съэкономив тысячу рублей, поэтому для данного проекта выбрал, проверенные и зарекомендовавшие себя регуляторы T-Motor 40A Opto.

Аккумуляторы четырех баночные 5000мА по две штуки параллельно. Крепление сделал на кронштейнах для установки снизу.
Пропеллеры, которые удалось достать на данный момент, только на 15 дюймов. Поэтому тестирование и первые полеты выполняю именно на них.
Брал самые простые безымянные T-Style пропеллеры треугольной формы. Ничего не балансировал, как говорится, поставил и полетел.
Для выполнения съемки установил подвес Tarot T-2D с камерой GoPro3BE.
Фотографирование выполняется через каждые 5 секунд. Для уменьшения искажений установил угол съемки средний, а разрешение 7 МПкс.
Чтобы ноги не попадали в кадр сделал другие крепления.

Тесты показали, что на двух батареях коптер висел до отсечки 30 минут. Поставленная цель достигнута, в будущем эксперименты с винтами и аккумуляторами.
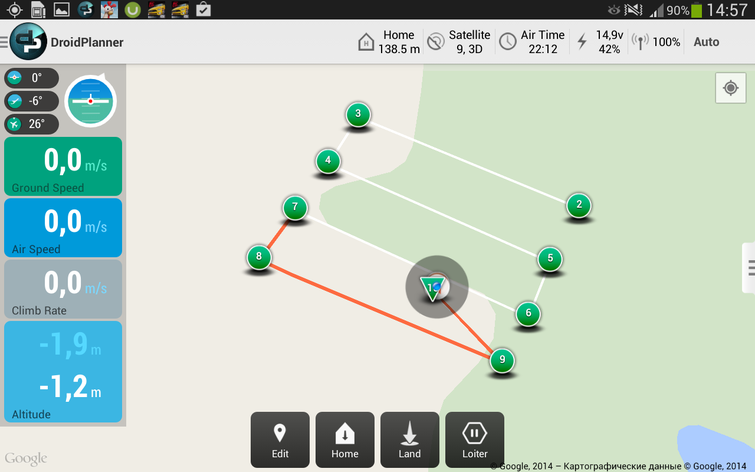
Спроектировал полетное задание, состоящее из четырех маршрутов с учетом продольного и поперечного перекрытия между снимками и маршрутами.
Обработка данных выполнялась с применением специального программного обеспечения Agisoft PhotoScan.
https://www.youtube.com/watch?v=oxlnuCB6AQw
3D модель можно посмотреть тут (3д.pdf) Модель можно вращать и приближать.
Фотоплан тут (1.jpg) . Пришлось конвертировать в jpg и уменьшить разрешение.