




Не давал мне покоя вот этот набор от 3DRobotics https://store.3drobotics.com/products/3dr-aero?taxon_id=32
Собран он на базе Skywalker-а c размахом крыла 1880 мм. По сути все комплектующие есть, можно попробовать сделать похожий.
На официальном сайте есть полезная инструкция
Прочитал на форуме две профильные ветки http://forum.rcdesign.ru/f90/thread198943.html
Вторая посвящена версии 2013 года http://forum.rcdesign.ru/f90/thread306620.html
Из более 300 страниц, выяснил для себя, что Скай предпочтительнее брать с крылом Кондор 1880 мм и с верхним расположением горизонтального стабилизатора. Экономичными по расходу энергии при полетах на дальние расстояния считаются ранние версии, которые с узким фюзеляжем.
По сути дела можно купить на любой вкус версию с http://bevrc.com/ или http://www.fpvmodel.com/
На HK выбор не такой разнообразный, как у других продавцов http://www.parkflyer.ru/#category=20091&type=category&page=first
Я решил попробовать взять с fpvmodel версию 2013 года с карбоновой балкой, верхним стабилизатором и крылом 1880 мм. Только тут была именно такая модификация. Производитель называет «modular design», т.е. модульная конструкция. Также воспользовался опцией бесплатной EMS доставкой, как же не просто уложится в их требования по весу до 3 кг и стоимости больше 200 USD. Поэтому добавил 4 сервы EMAX 08MA и мотор – T-Motor AT2820 830kv http://www.fpvmodel.com/t-motor-at2820-kv830-brushless-motor_g330.html.
Почему я решил переплатить и взять качественный мотор? Честно сказать, я остался не доволен мотором, который предлагает BEVRC. Достаточно большой люфт на новом моторе, так как ось мотора и диаметр подшипников не соответствуют. Многие летают на моторах Turnigy, у меня в запасе есть парочка 3542, вот только их качество и характеристики не блещут. Количество оборотов на вольт по оптическому тахометру было существенно выше, а когда один мотор сгорел, то вскрытие показало разное количество витков в обмотках
Вернемся к самолету.
Привезли посылку очень быстро, почта работает в этом году на удивление стабильно без задержек.
Видел в продаже стеклопластиковую «галошу» для защиты нижней части фюзеляжа. Вес и цена конечно не порадовали, поэтому решил сделать ее сам из пластиковой бутылки.
Фюзеляж оклеил скотчем, чтобы гипс не прилип к рабочей поверхности. Красным скотчем сделал отметки-маячки. После высыхания получилась форма.



Внутрь формы положил пищевую пленку и залил ее гипсом.
Получилась болванка, на которую осталось усадить пластиковую бутылку. Первоначально думал, что подойдет бутылка из-под лимонада 2,5 литра, но она оказалась мала. Пришлось взять 6 литровую бутылку из-под воды. В итоге защиту сделал из двух частей, соединив их между собой скотчем.




К фюзеляжу самодельную защиту прикрепил на скотч.

Так же решил усилить хвост, вертикальный стабилизатор выглядел хлипко. Подкосы, на мой взгляд, портят вид самолета. Внутри предусмотрены пазы для двух стержней толщиной 3 мм. В комплекте их не было, поэтому купил в магазине метровый угольный пруток.




В хвостовой балке просверлил отверстия. После тщательных примерок все склеил
Весь самолет заламинировал пленкой формата А2. Данный формат пленки идеально подходит под поверхности Скайвокера.
Крепление крыльев переделал. На мой взгляд, не надежное решение. Выводы были сделаны еще при эксплуатации вертолета, когда аккумулятор фиксировался резиновым кольцом, которое вечно рвалось.
Поэтому в магазине тканей купил велкроленту и сшил простое и надежное крепление. Поперечные трубки удлинил, так как они выступали лишь на сантиметр, а липучка шириной 2,5 см.


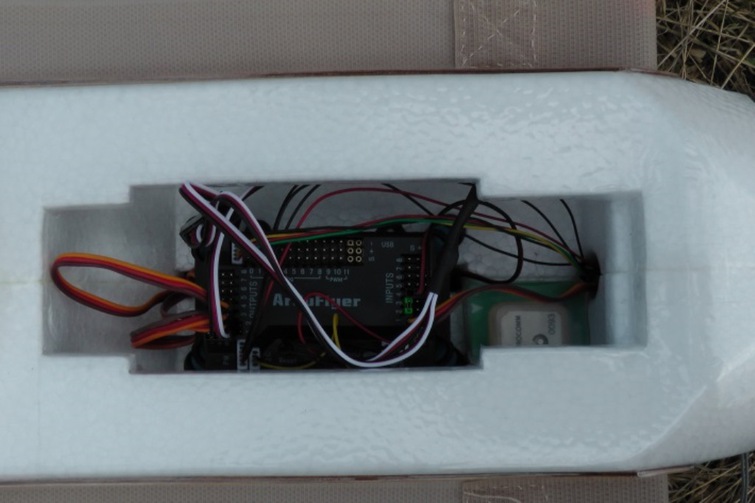
Электроника
Полетный контроллер установил APM с модулем GPS NEO-6M и компасом, датчиком тока, модулем телеметрии и аналоговым датчиком воздушной скорости.
APM, GPS и приемник разместились в полости под крылом, вся остальная электроника на полке ниже.
О настройке я подробно писать не буду, этому моменту было достаточно внимания уделено в моей предыдущей статье о летающем крыле
Единственно, приведу скриншот моих настроек.
Кстати первые полеты были выполнены на пид-ах по умолчанию и летел самолет вполне адекватно.
Но разработчик рекомендует отталкиваться от следующих параметров:
RLL2SRV_P: 1.8
PTCH2SRV_P: 1.5
NAVL1_PERIOD: 20
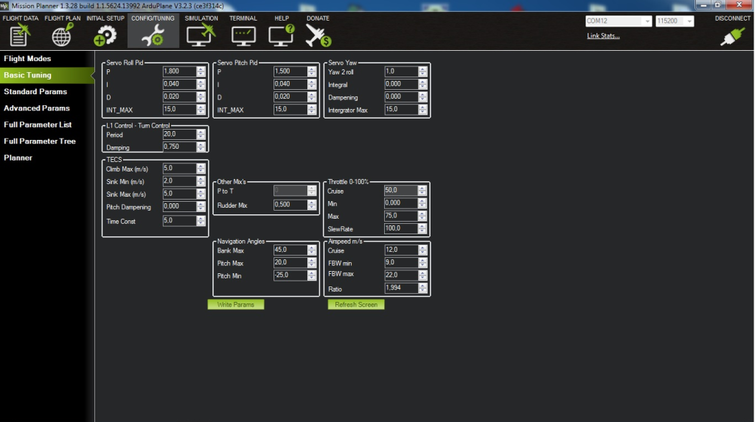
С данными настройками поведение самолета мне понравилось больше, пока их и оставил.
Батареи Turnigy 4s 5000mAh 40C.

Специального крепления батареи не делал, просто фиксирую кубиками из вспененного материала — легко, удобно и при ударе будет дополнительный элемент деформации.
Наступило время первого запуска.
Предполетная подготовка выполнена. Проверяю центровку, она у меня по каналу сервокабеля.

Разбег перед броском и самолет с небольшой просадкой начинает набирать скорость и высоту. Ветер был в тот день достаточно сильный.
Второй полет был настроечный, пытался оттриммировать рулевые поверхности для прямолинейного полета.
Все настроено и неоднократно проверено перед тестированием режимов с применением GPS модуля.
Взлет в режиме FBWA mode, далее предполагалось попробовать возврат на точку взлета (RTL) и полет по кругу над точкой взлета (Circle).

Картинка без каких-либо искажений, при взлете на полном газу тоже полный порядок. Претензий к качеству мотора T-Motor и пропеллера APC 12х6 нет.
Самое интересное это конечно автономный полет, когда самолет сам взлетит, пролетит по маршруту и приземлится. Пробовать решил поэтапно. Сначала нужно настроить взлет в автоматическом режиме.
Автоматический взлет (Takeoff)
Запуск в автоматическом режиме у меня будет выполняться с катапульты, для этого был установлен крюк.
В APM-е за взлет отвечают следующие параметры:
TKOFF_THR_MINACC
TKOFF_THR_DELAY
TKOFF_THR_MINSPD
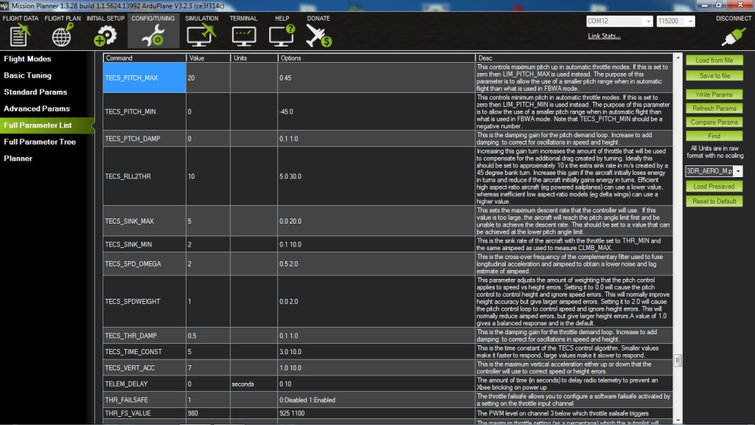
TECS_PITCH_MAX
Необходимо учитывать особенности запуска с применением резинового жгута.
Минимальное ускорение TKOFF_THR_MINACC рекомендуется 15 м/c^2
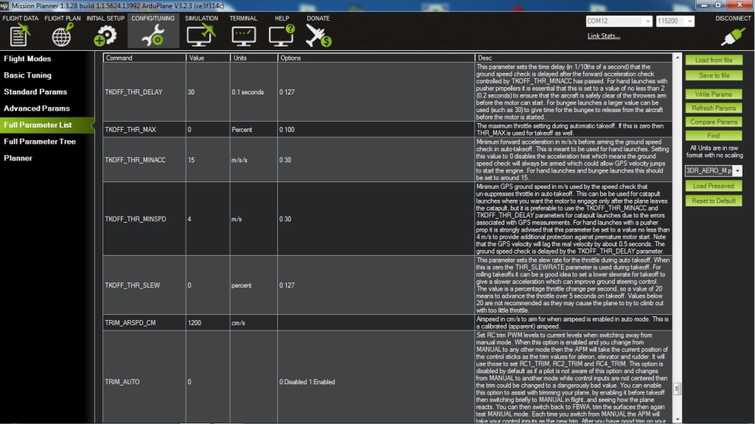
Устанавливаем задержку запуска двигателя параметром TKOFF_THR_DELAY. Несколько раз просмотрел отснятые ранее видео моих запусков и установил 3 секунды, для этого выбрал значение 30.
Минимальная скорость TKOFF_THR_MINSPD, при достижении которой будет включен двигатель. Минимальная скорость определяется по GPS, я установил значение равное 4 м/c.
Максимальный угол взлета TECS_PITCH_MAX в 20 градусов, как заявляют разработчики, будет оптимальным для большинства моделей для уверенного набора высоты.
Настройки все выполнены. В полетном задании добавляем команду NAV_TAKEOFF, теперь можно пробовать.
Для того чтобы понять логику работы автопилота, я снял с мотора пропеллер и пробежался с самолетом в руках, смоделировав взлет с катапульты.
Теперь точно, все готово к запуску в автоматическом режиме. Самолет установлен на направляющие катапульты, выбираю режим Auto, ручка газа в положение 50% и жму педаль катапульты. Отличный взлет.
За автоматическую посадку отвечают следующие параметры:
LAND_FLARE_ALT
LAND_FLARE_SEC
LAND_PITCH_CD
TECS_LAND_ARSPD
TECS_LAND_SPDWGT.
Высота над землей LAND_FLARE_ALT, когда самолет начнет приподнимать нос. Я поставил 3 метра.
Время до приземления LAND_FLARE_SEC 2 секунды.
Воздушная скорость захода на посадку контролируется параметром TECS_LAND_ARSPD. Не знаю, какое значение прописать, поэтому оставил -1, отрицательное значение означает, что параметр отключен.
Приоритет контроля воздушной скорости в сравнении с контролем высоты определяется параметром TECS_LAND_SPDWGT равный баланс при значении равном 1, в интервале от 0 до 2 меняется приоритет. Значение, близкое к 2 дает более высокий приоритет воздушной скорости, а значение ближе к 0 дает более высокий приоритет регулировки высоты. Если посадка выполняется на скорости, близкой к скорости сваливания рекомендуется выбрать высокий приоритет контроля воздушной скорости.
Параметр LAND_PITCH_CD позволяет задать минимальный угол по питчу при посадке. Для большинства самолетов LAND_PITCH_CD должно быть малое положительное число (например, 300, что означает 3 градуса), чтобы не сломать переднюю стойку шасси или пропеллер. Вот тут-то меня ожидал сюрприз. При посадке же самолета на живот параметр может быть отрицательным, чтобы уменьшить вероятность свечки, что позже у меня и произошло.
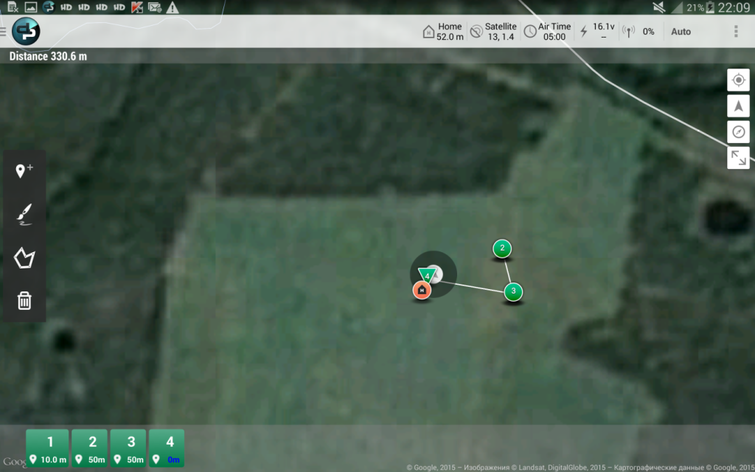
Полетное задание было сокращено, первая команда автоматического взлета takeoff с набором высоты до 10 метров, на карте она не отображается, две точки маршрута Waypoint 2 и 3 с высотой 50 метров и четвертая команда для автоматической посадки Land с высотой 0 метров.
С самого начала все пошло немного не так.
Стик газа в момент спуска с катапульты находился в крайнем нулевом положении, из-за чего двигатель не включился через 3 секунды, а это произошло позже, после того как я вспомнил и передвинул стик газа в центр. В связи с этим на вторую точку маршрута самолет с первого раза не зашел, для достижения отметки в 50 метров сделал дополнительный кружок. На посадку зашел, круто спустившись с 50 метров, на высоте около 2-3 метров выключил мотор, и начал набирать высоту согласно заданному параметру LAND_PITCH_CD. Таким образом летел еще метров 10, набирая высоту до 5-6 метров и теряя скорость, после чего произошло сваливание.
После неудачной посадки на фюзеляже остались небольшие повреждения. С каждой стороны пена немного лопнула, нос стал весь в морщинах, из-за деформации защитный «тапок» стал великоват и пошел волной. Автопилот сорвало с демпферной площадки, полка с электроникой внутри фюзеляжа сдвинулась, вытянув за собой всю электронику.

Логи переписать из памяти автопилота не получилось, скачивая файл, программа сообщает об ошибке, что один из параметров имеет слишком большое или маленькое значение. Было достаточно обидно, почему в программе не предусмотрено исправление ошибок? Вот так лишили возможности проанализировать полет.
Как в сказке про Конька-Горбунка, искупаю его в котле с «кипятком» для омоложения.

Опустил в кастрюлю с холодной водой и постепенно ее нагревал, но до кипения не доводил. Действительно пена приняла свой первоначальный вид.

Поверхности, которые не поместились в кастрюлу, прогрел обычным утюгом.
Выводы
В целом самолет очень нравится. Легко управляется, замечательно летит на не высоких скоростях. Крейсерская скорость чуть меньше половины газа. В безмоторном режиме великолепно планирует.
При сборке усилил хвост, заламинировал все элементы, заменил крепление крыла и сделал защиту живота.
Сейчас летаю с пропеллером APC, но при транспортировке он оказался очень неудобный, все время торчит то вверх, то вбок. Во время хранения пропеллер приходится снимать, поэтому планирую поставить складной.
Полеты с камерой показали высокую стабильность, на видео нет искажений в любых режимах полета.
Качество изготовления элементов конструкции из пены практически идеальное, все ровное, без повреждений, стыковалось без проблем. Разве что накладки на каналы крыльев оказались на миллиметр выше поверхности крыла. Предпринимать каких-либо действий я не стал, на скорость не влияет.
Ремонтопригоден, после падений деформированные детали легко восстанавливают формы под действием температуры. Для равномерного прогрева лучше всего варить в емкости с водой или использовать утюг.
Из минусов следует отметить парусность большого фюзеляжа. При порывах ветра это особенно заметно.
Проект Ardupilot для коптеров разжеван уже на многих ресурсах, а вот применительно к самолетам информации практически нет. На официальном сайте очень сухое руководство. На форумах идет обсуждение технических моментов и первоначальных настроек, а вот о тонкостях настройки информации мало.
С настройками пришлось немного повозиться. Были моменты, когда самолет начинал сам менять высоту, несколько раз пытался улететь в непонятном направлении. Все это конечно напрягало, для ряда случаев удалось найти объяснение, но остались и открытые вопросы.
Буду дальше изучать Ardupilot с самолетной прошивкой. Сейчас самолет в разобранном виде и это повод для загрузки свежей прошивки 3.3.0.
Всем удачных полетов.