




Мысли о следящей антенне начали появляться, когда полеты уже на значительные расстояния стали сопровождаться потерей связи наземной станции с летательным аппаратом. Приходилось модем подключать через usb-удлинитель и пытаться направлять его антенну на модель. Это все вызывало трудности и отвлекало от управления моделью.
После выхода одной из первых прошивок прошел уже год. На тот момент не все было продумано, а реализация некоторых функций вызывала сомнения.
Pan/Tilt для антенны
Изучив основные конструкции антенных пан/тилтов, решил делать на подобии платформы от EagleEyes Antenna Tracker http://www.goodluckbuy.com/eagle-tree-antenna-pan-tilt-for-eagleeyes-antenna-tracker-.html.
 Механизм поворота антенны наземной станции (без серв)
Механизм поворота антенны наземной станции (без серв)
 Товар http://www.parkflyer.ru/product/1505279/
Товар http://www.parkflyer.ru/product/1505279/
Сам поворотный механизм собрал из имеющихся материалов: фольгинированного стеклотекстолита, фанеры и алюминиевых уголков.
Для поворотной платформы использовал сервоприводы, которые лежали у меня уже много лет без дела — Hitec HS-422 Deluxe Standard Servo http://www.servodatabase.com/servo/hitec/hs-422, они остались от системы радиоуправления Hitec Optic. HS-422 ничем не примечательные сервоприводы с пластиковыми шестеренками и невысоким крутящим моментом, но обладают одной особенностью – они способны отклоняться на 180 градусов. Для этого длину управляющего импульса нужно установить от 900 до 2100 µs.

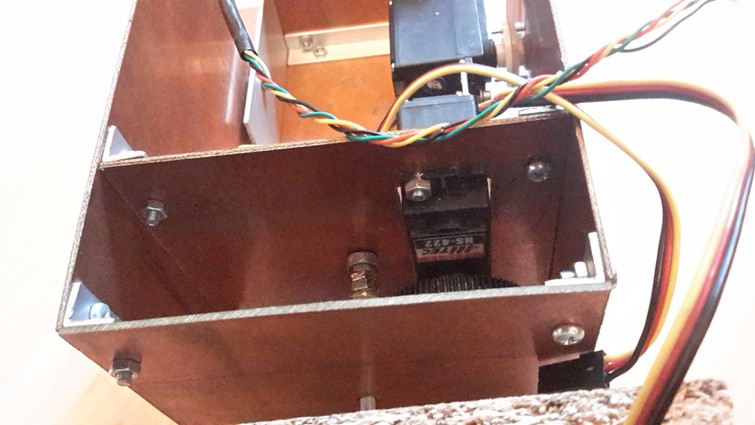
В связи с этим мне пришлось предусмотреть в своей конструкции редуктор для обеспечения угла поворота на 360 градусов. Соответственно на сервопривод мне нужно было установить шестеренку с количеством зубьев в два раза больше, чем в шестеренке на оси вращения платформы. Подходящие шестеренки мне удалось найти в одном нерабочем принтере.
Первая версия поворотной платформы имела ряд недостатков. В качестве оси вращения я использовал обычную шпильку с резьбой М4, по-этому отверстия быстро разболтались, а сама конструкция выглядела не надежно.


Решил переделать данный узел, хотелось его реализовать на подшипниках. Решение нашлось не сразу.
Когда-то я рассказывал про платформу для настройки реакции хвостового ротора вертолета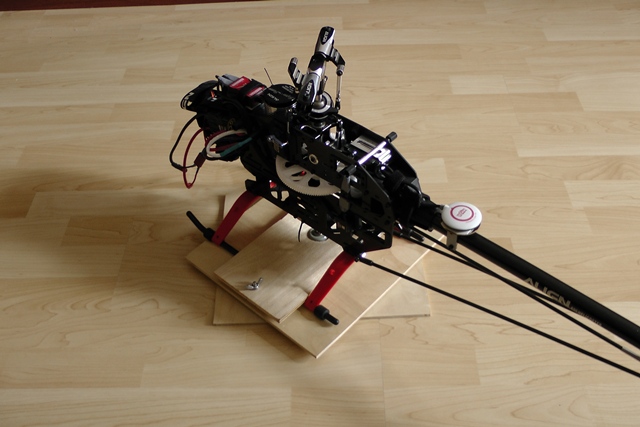 Платформа для настройки хвостового гироскопа+42
Платформа для настройки хвостового гироскопа+42
6 июля 2013 года в 18:58 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/1831/, там как раз оказался нужный мне блок подшипников.


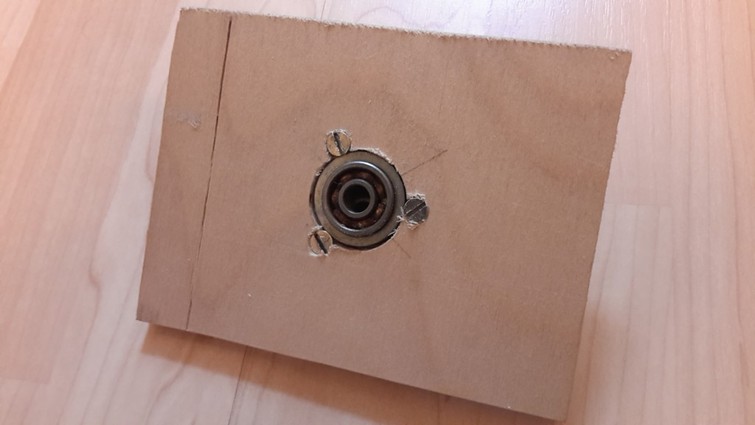
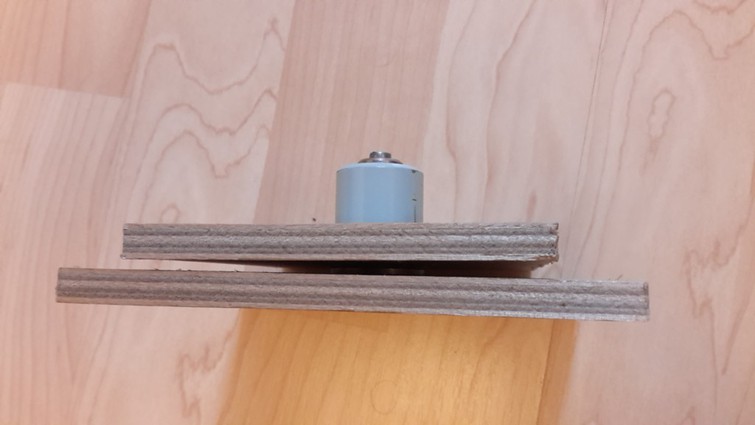
Основание и нижнюю часть поворотной платформы выпилил из 8 мм фанеры. Теперь поворотный узел выглядит солидно, можно сказать монументально.
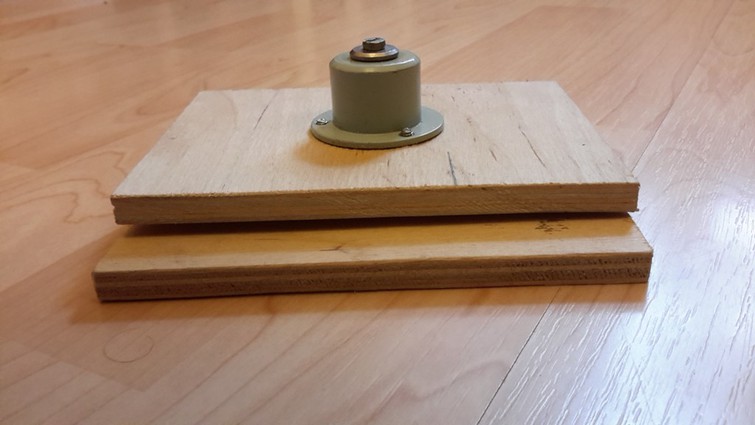
Центральный винт М4, под имеющуюся шестеренку не пришлось ничего переделывать, только заменил винт на более длинный.
После проведенной модернизации поворотная платформа преобразилась.

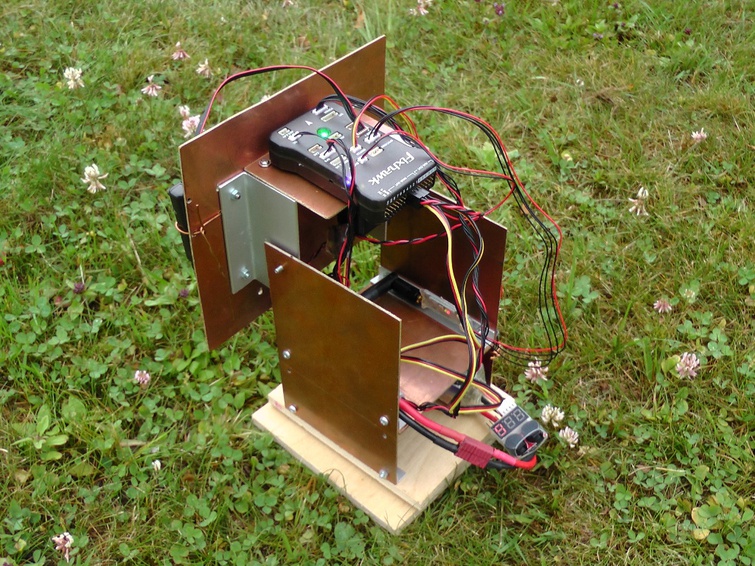


Установка и настройка электроники
Контроллер я установил Fixhawk, клон от RCTimer Rctimer Fixhawk/Pixhawk 32bit Flight Controller
Rctimer Fixhawk/Pixhawk 32bit Flight Controller
Товар http://www.parkflyer.ru/product/1469287/.
GPS-модуль со встроенным компасом NEO-6M Rctimer NEO-6M GPS module & MAG v1.2
Rctimer NEO-6M GPS module & MAG v1.2
Товар http://www.parkflyer.ru/product/1466882/.
По заявлениям разработчика, можно использовать и APM 2.5-2.6 но для этого нужно распаять второй UART.
Контроллер запитал от 3s LIPO батареи через датчик тока. Две сервомашинки питаются от отдельного регулятора напряжения.
Сервоприводы подключил следующим образом: к выходу RC1 подсоединил сервомеханизм для поворота (pan), к RC2 – наклон (tilt) соответственно.
Наземную станцию к компьютеру можно подключить несколькими способами:
1. Через usb-порт;
2. Радиомодемами через порт Telem2;
3. Bluetooth через порт Telem2.
Порт Telem1 используется для передачи данных между антенным трекером и моделью.
Для подключения я использовал два варианта:
1. радиомодемы и BT-модуль;
2. два комплекта радиомодемов.
Можно использовать подключение через USB, главное взять кабель потоньше и подлиннее. Но надо пробовать – не все подходят.
Bluetooth модуль подсоединил такой Multiwii MWC FC Bluetooth Module для беспроводной связи устройств (совместимый с Android)
Multiwii MWC FC Bluetooth Module для беспроводной связи устройств (совместимый с Android)
Товар http://www.parkflyer.ru/product/1005673/, он наверно наиболее удобен, так как сейчас в большинстве мобильных устройств данный интерфейс присутствует. Для коммуникации не требуется подключения дополнительных устройств, достаточно один раз настроить это соединение.
В MissionPlanner с некоторых пор присутствует вкладка для настройки BT-модуля.

Но через «синий зуб» обмен данными идет медленнее, особенно это заметно в момент подключения.
При подключении двумя парами модемов не забываем их настроить. Выбираем для каждой пары свой NetID.

Что касается первоначальных настроек.
1. Калибруем акселерометры одним из приведенных способов. Поворотная платформа по габаритам не самолет, который особо не покрутишь, поэтому без проблем можно выполнить калибровку во всех плоскостях, результат будет точнее, чем при калибровке в одной плоскости.
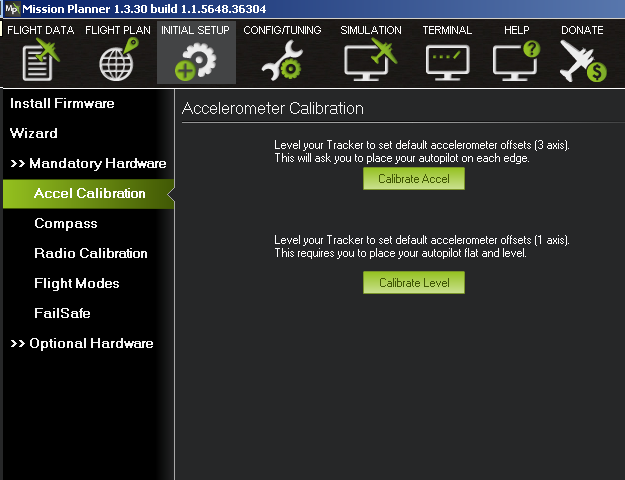
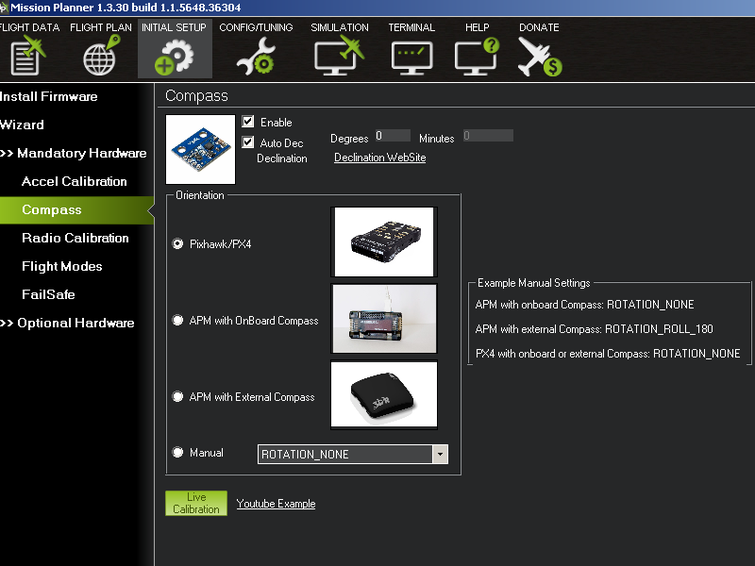
2. Калибруем компас. Операция уже привычная, крутим-вертим пока шар не окрасится. При достаточном количестве данных программа сама сообщает о завершении операции и показывает офсеты.
Успешно выполнив эти две калибровки датчиков, можно переходить в следующую вкладку Config/Tuning.
Настроек там не так уж и много, все необходимые параметры сведены в одном окне Extended Tuning.
По умолчанию выставлены следующие значения.
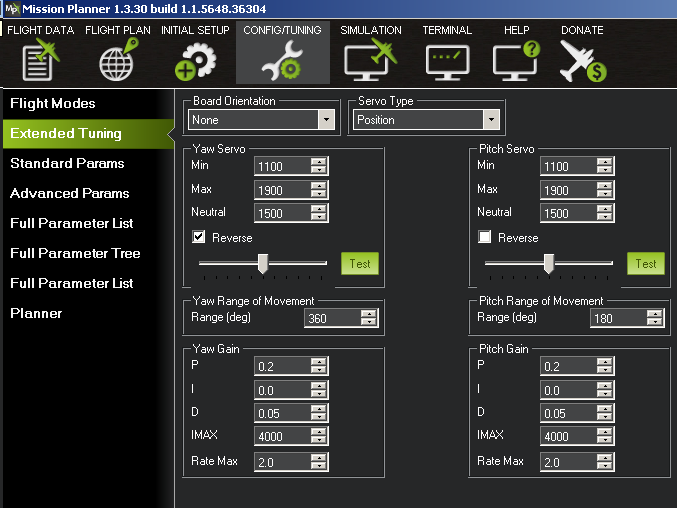
Первым делом проверяем расположение контроллера. Если стрелка на контроллере находится в одном направлении с антенной, в таком случае выбирать ничего не нужно.
Выбираем тип сервопривода, в новой прошивке добавлен тип непрерывного вращения.
Далее задаем ширину импульса управляющего сигнала для минимального, максимального и среднего значения.
Настраиваем реверсы для каждой оси. Для проверки используем кнопку Тест и движок для изменения угла отклонения.
Угол отклонения для каждой оси можно ограничить. Я поставил 360 и 90 градусов соответственно.
Далее настраиваем ПИДы. Технология настройки практически такая же, как для коптера, тут я писал о своем опыте настройки пидов.1386648425431.png) Настройка и пробный полет моего коптера+116
Настройка и пробный полет моего коптера+116
10 декабря 2013 года в 11:39 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/3263/
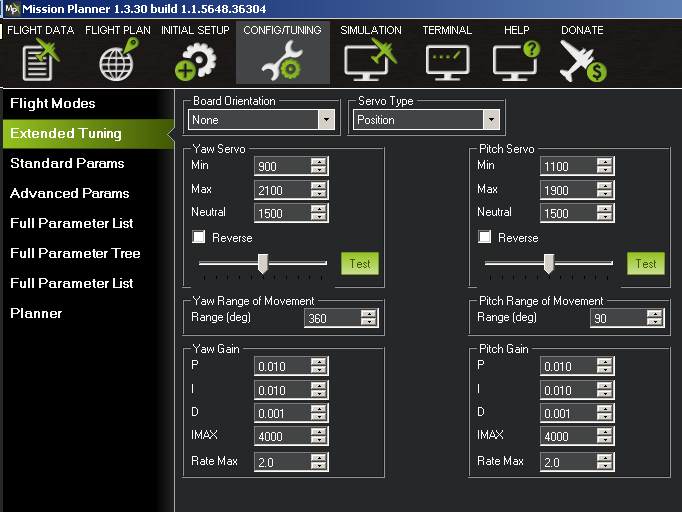
Мне пришлось очень сильно зажать значения. Через Extended Tuning не получалось уменьшить значения, удалось только через полный лист параметров ввести значения на порядок меньше.
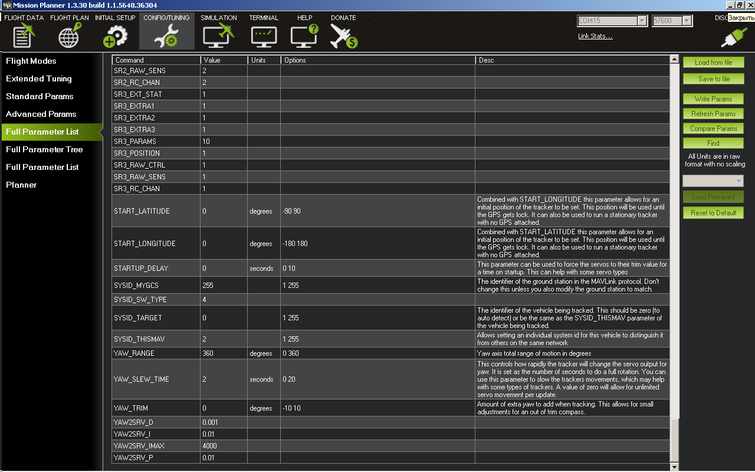
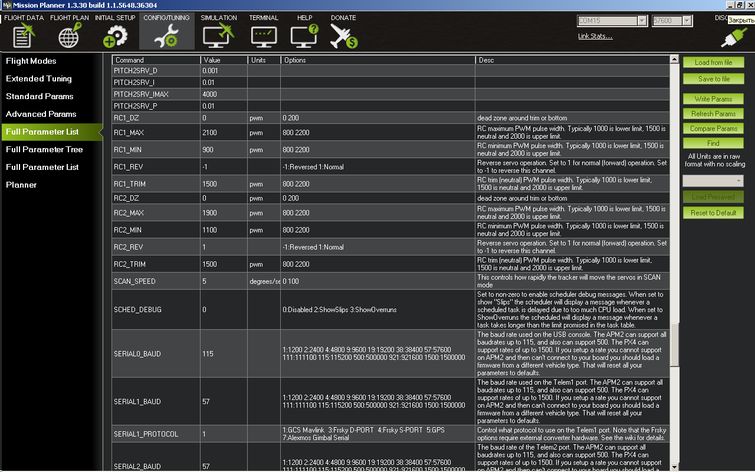
После уменьшения значений дерганья прекратились, перемещения стали плавными.
Вот мои настройки
Настройка завершена, можно переходить к тестированию.
После успешного подсоединения в окне карты MissionPlenner-a появится антенна. Если включена модель, то также будет отображаться модель.

Для переключения между трекером и моделью в MissionPlenner появляется меню. При выборе модели, в моем случае был самолет Fixedwing, отображается телеметрия с борта самолета, данные транслируются сквозняком с модели на наземную станцию. Пробовал другие программы, такие как APMPlanner2, QGround, но ничего подобного как в MissionPlanner пока не было реализовано.
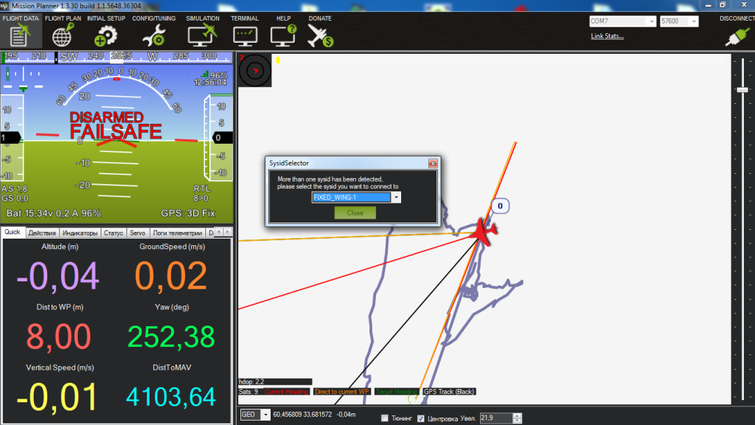
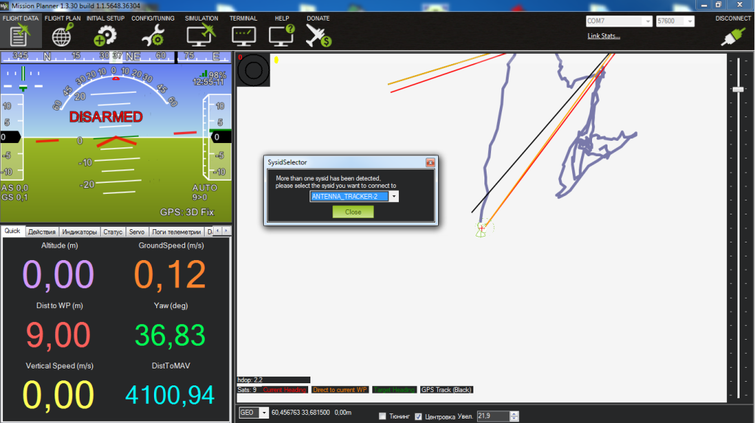
Причина не всегда адекватного поведения связана с ошибками координат. Модель лежит неподвижно на земле, но на экране она будто перемещается, о чем свидетельствует траектория движения модели и антенны на рисунке ниже.

Направление до модели определяется по двум парам координат. Угол поворота контролируется по компасу, поэтому GPS с внешним компасом я разместил на поворотном основании подальше от сервоприводов.

Угол наклона антенны определяется по координатам и барометрической высоте трекера и модели.
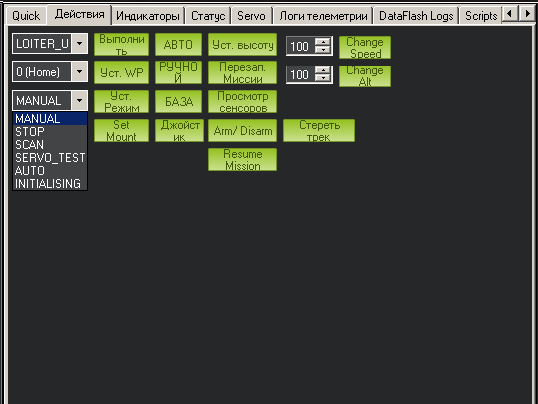
В MissionPlanner-e можно переключать режимы работы трекера в окне «Действия».
На выбор доступно шесть режимов: Manual, Stop, Scan, Servo_Test, Auto, Initialising. Думаю, что особо пояснения и не нужны, из названий и так все понятно. Основным режимом является Auto, он активируется сразу после включения.
Первый тест выполнялся с настройками по умолчанию, наблюдались сильные осцилляции, но несмотря на это поворотная антенна корректно реагировала на перемещение модели.
Второе видео демонстрирует работу «поворотки» с настроенными пидами. Прошивка загружена крайняя на момент написания статьи версии 0.71
Выводы
В целом система работает. Почти за год с момента релиза, разработчиками многое было доведено до ума. Но данные телеметрии с модели можно получать только в MissionPlanner-е под Windows, в остальных программах данные отображаются только для антенного трекера, а модель не выбрать. Нет сомнений, что со временем программное обеспечение будет доработано.
Система работает автономно, без подключения к компьютеру. Сначала включаем трекер, потом – модель. Звуковым и световым сигналом трекер сообщает об успешной инициализации и подключении к модели. После чего он начинает отслеживать положение модели.
Самое дорогое в данном антенном трекере — это контроллер, поэтому стоимость изготовления трекера зависит от выбранной платформы APM или PX, если смотреть на бюджетный вариант, на базе APM-e она составит около 50$. Аналогичные решения стоят в несколько раз больше, ценник на них начинается от 200USD.
В ближайших планах — установить и попробовать направленную антенну для приема видео сигнала для FPV полетов.