




В этой статье я расскажу о своем опыте настройки летающего крыла, а также поделюсь впечатлениями от первого полета.
В своем дневнике http://www.parkflyer.ru/38737/blogs/view_entry/2090/я рассказывал о постройке модели летающего крыла из пенокартона.
Это моя первая модель, которую я построил своими руками. Все оказалось не так сложно, как казалось на первый взгляд.
На летающее крыло установлена следующая электроника:
Пара сервоприводов Hitec 82MG
Приемник FrSky TFR8SB http://www.parkflyer.ru/38737/product/440773.
Система стабилизации F-TEK 31AP Система стабилизации полета F-TEK 31AP и F-TEK OSD Combo
Регулятор Turnigy SuperBrain 80A Turnigy Super Brain 80A Brushless ESC
Мотор Turnigy 3542 1250kv Бесколлекторный двигатель Turnigy D3542/5 1250KV
складной винт 10×8 дюйма
аккумуляторы Turnigy 2200 11.1v 25C Turnigy 2200mAh 3S 25C Lipo Батарея
регулятор напряжения Turnigy 5A (8-26v) SBEC Устройство бортового питания Turnigy 5A (8-26v) SBEC для Lipo
Полетный вес летающего крыла составил 1453 грамма. Многие в комментариях писали, что модель очень тяжелая, но я считаю, для модели в 1,6 метра вес вполне нормальный.
Разместив электронику, удалось добиться нужной развесовки. Центр тяжести находится на расстоянии 262 мм от носа, т.е. соответствует 20%.
Что касается настроек, то в пульте я создал новую модель. Долго мучился с настройками, пока до меня не дошло, что же я делаю не так.

Сначала я выбрал схему летающего крыла — Flying Wing 2AIL, но работать такая схема отказалась наотрез. Хотя подключал согласно приведенной производителем диаграммы.
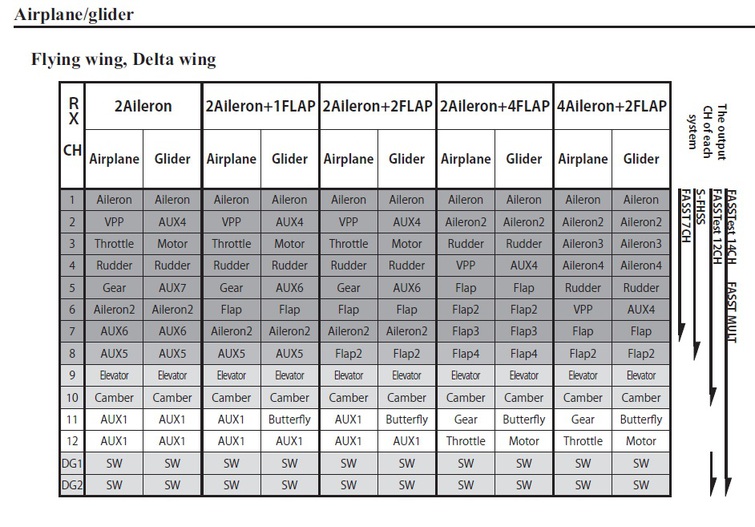
После длительных мучений, выбрал Wing Type (Normal) – 1 Aileron. Буквально сразу все зашевелилось именно так как и требовалось. Как уже потом выяснилось, причина была в системе стабилизации, она сама микширует сигнал под соответствующий тип самолета.
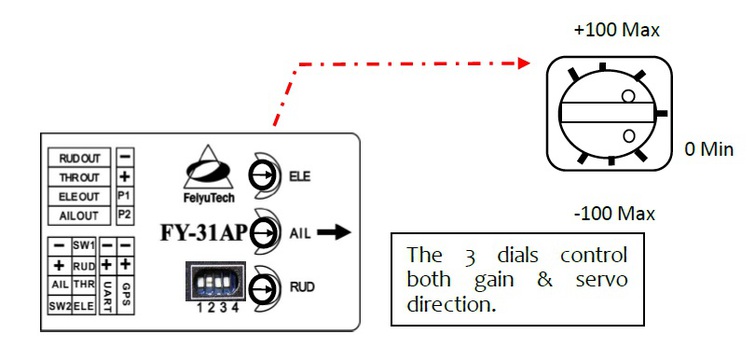
Система стабилизации была настроена под летающее крыло с помощью четырех переключателей.

В итоге в пульте выбран следующий тип модели.

Тип хвоста выбираем Normal, соответственно к четвертому каналу ничего не подключаем.
Для корректного отклика на стики настраиваем реверсы.
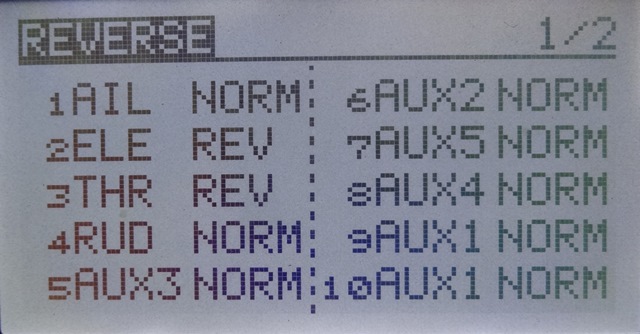
Отклоняем стики и наблюдаем за элеронами.
При настройке смотрим на самолет сзади. Отклоняем стик, управляющий элеронами, влево — элерон на левой плоскости поднимается вверх, соответственно на правой — опускается вниз, и наоборот. Стик элеватора тянем на себя, элероны отклоняются вверх, от себя — вниз.
Когда стики находятся в центре, элероны должны находиться в нейтральном положении, иначе регулируем длину тяг.
Далее проверяем отклик системы стабилизации.

Крутим самолет в пространстве и наблюдаем за отклонением элеронов.

Если они отклоняются в другую сторону, а не так как указано на рисунках, то крутим соответствующий переменный резистор.
Обязательно в системе стабилизации проверяем и записываем нейтральное положение, иначе идеального полета в режиме стабилизации будет добиться сложно.
После тщательных проверок можно ехать на поле и запускать самолет для первого тестового полета.

Видео моего первого полета
Сразу после первого полета стало ясно, что летающее крыло достаточно вяло реагировало в полете на отклонение стиков. На земле стало ясно, что тяги, сделанные из шпажек для еды, не выдерживают нагрузок и сильно гнутся.
Тяги были сделаны из 4 мм угольных трубок. Трубочки внутри полые, поэтому скрепку согнул петелькой и вклеил ее на эпоксидную смолу. После переделки поведение модели в воздухе стало адекватным.

Подводя итоги, хочу сказать, что модель в воздухе ведет себя достаточно предсказуемо. Хотя профиль крыла достаточно специфичный, но на видео отчетливо видно, что модель при сбросе газа имеет способность планировать. На полном газу модель стремительно нарезает воздушное пространство. Силовой установки для этого вполне достаточно.
На самом деле очень непривычно управлять моделью без руля направления, даже после нескольких полетов машинально пытаешься подруливать.
Данная конструкция выдержала несколько жестких падений после неудачных попыток запуска. Были опробованы различные способы запуска, но наиболее оптимальным оказался по типу бумеранга (запускали вдвоем).