



 В своем дневнике я уже рассказывал про автопилот F-TEK 31AP. Полет в режиме стабилизации, полет по кругу и возврат домой отлично работали при первых тестовых полетах. Из-за нехватки времени полет по точкам удалось попробовать только сейчас. Поделюсь своими впечатлениями.
В своем дневнике я уже рассказывал про автопилот F-TEK 31AP. Полет в режиме стабилизации, полет по кругу и возврат домой отлично работали при первых тестовых полетах. Из-за нехватки времени полет по точкам удалось попробовать только сейчас. Поделюсь своими впечатлениями.Следует отметить, что автопилот 31AP имеет энергозависимую память для записи маршрута. Таким образом, маршрут нужно загружать после каждого подключения аккумулятора. Есть в этом решении и положительный момент – самолет по ошибке не улетит по ранее составленному маршруту.
Есть возможность заранее составить маршрут, сохранить его в файл и загрузить из файла, но об этом чуть позже.
Маршрут проектируется в специальном окне «Edit waypoint». Но чтобы приступить к проектированию маршрута, нужно выбрать опцию «Waypoint Editing» для перехода к редактированию.
По умолчанию высота полета составляет 200 метров, чтобы это значение изменить необходимо в поле ввода указать новое значение и нажать кнопку «Set», чтобы значение вступило в силу.
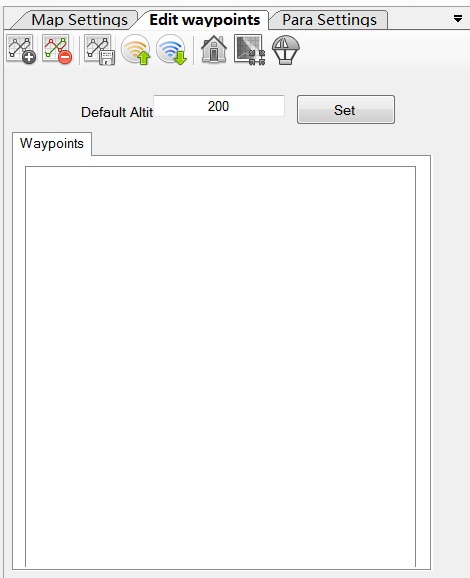
Далее выбираем пиктограмму «Добавить» и на карте ставим точку, удерживая клавишу Ctrl. Если хотим изменить высоту для следующей точки, то вводим новое значение и жмем «Set», после чего добавляем новую точку. При добавлении больше двух точек, маршрут замыкается автоматически.
Отдельно можно добавить точку «Home», она может отличаться от точки взлета. Иногда такая опция бывает полезной.
Размещение точек можно корректировать, выбираем «Edit target Waypoint» и мышью изменяем положение точек на карте. К сожалению, последнюю точку удалить не возможно, только все сразу, что не удобно в случае ошибки при вводе, и приходится маршрут создавать заново с нуля.
Сохранить маршрут можно через инструменты «Tools», выбрать «Export Waypoints», указать имя файла и нажать «Сохранить».
Загрузить ранее созданный маршрут можно через основное меню инструментов — «Import Waypoints». Таким образом полетное задание можно заготовить заранее и в поле не терять на это время.
Записать готовый маршрут можно перед взлетом через usb-кабель или с помощью радиомодема. С помощью радиомодема возможно передать маршрут в автопилот даже в полете, например при кружении над точкой взлета.
Передача маршрута в автопилот осуществляется кнопкой «Upload Waypoints».
После того как маршрут передан в память, я рекомендую удалить с экрана все точки и выбрать «Download Waypoints», это позволит проверить, что было записано в память автопилота. Когда вы убедились, что маршрут передан, можно летать по точкам.
Эксперимент с двумя точками показал, что полет выполнялся не строго по прямой. Связано это с тем, что самолет выполняет развороты и заходы для полета от точки к точке и траектория больше напоминает восьмерку.

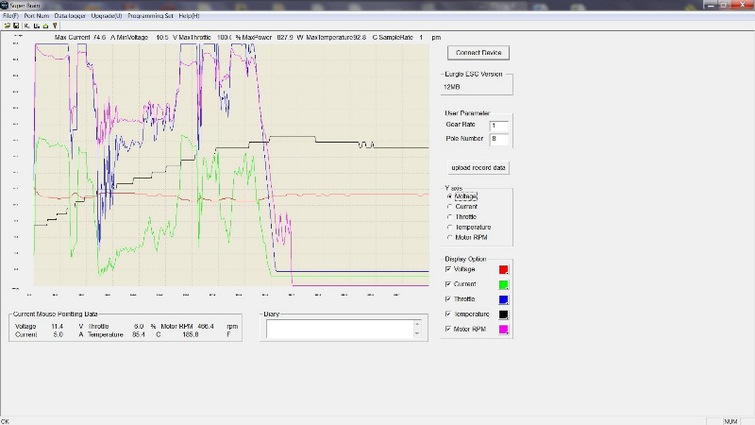
По лог-файлу с регулятора скорости видно, что взлет выполняется в режиме стабилизации на полном газу. Далее переход в режим полета по точкам, при котором автопилот удерживает значение около 50% (первая половина графика). Колебания связаны с необходимостью удерживать заданную скорость при полете в автоматическом полете.

При полете по замкнутому маршруту ситуация обстоит лучше и отклонения от запланированного маршрута не такие значительные. Прямые линий, соединяющие траектории по логу, связаны с потерей сигнала по радиомодему.
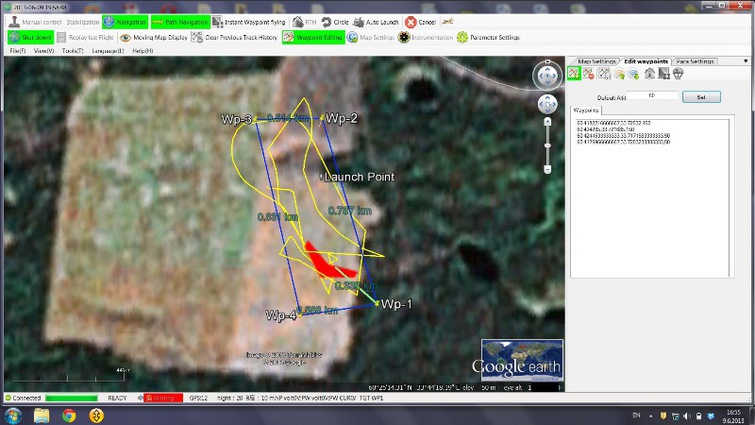
Так же замечена потеря сигнала по радиоуправлению, два раза самолет возвращался на точку взлета. После восстановления сигнала самолет автоматически продолжал выполнять заложенную программу полета по точкам.
В связи с тем, что я заложил точки на разной высоте с разбросом в сто метров, на графике видно возрастающую нагрузку на силовую установку. Температура регулятора к заходу на третий круг приблизилась к 100 градусам и регулятор ушел в «защиту». Посадка самолета с высоты около 150 метров была достаточно жесткой, но без серьезных последствий.
Анализ лога зарядки аккумуляторов после второго полета показал, что батареи взяли чуть больше 1100мА, половину от полной емкости. Таким образом можно увеличить продолжительность полета в полтора раза.

Приведу видео полета по точкам.
Еще одно видео демонстрирует полет по кругу.
https://www.youtube.com/watch?v=wFiWCj0XeFc
Несколько фотографий, полученных с самолета при полете по маршруту.


Подводя итоги тестирования полета по точкам, хочу сказать, что автопилот полностью справился с поставленной задачей. Конечно точность следования по маршруту связана с многими условиями, такие как точность позиционирования GPS, погодные условия (в основном боковой ветер), настройки автопилота (DIP).
По моему мнению следует при полете по точкам, настроить режим fail safe на полет по маршруту, тогда можно избежать повторяющегося возврата самолета к точке взлета. В свою очередь необходимо прокладывать маршрут с учетом дальности радиоуправления, хотя бы одна точка должна быть в зоне действия аппаратуры для перехода из автоматического в ручной режим для посадки.